Sökning - IDA.LiU.se
advertisement

Sökning
Sökning
! Datastrukturer och operationer
Datastruktur:
! Värdering av sökstrategier
nod =
! Blind sökning
[tillstånd, förälder, operator, djup, vägkostnad]
! Heuristisk sökning
Expandera varje nod
! Constraint satisfaction
! Spelförande program
Applicera operatorer på ett tillstånd och generera alla nya
tillstånd
Ex: Initialtillståndet (0, 0) expanderas till (4, 0) och (0, 3)
(4, 0) expanderas till (0, 0) (4, 3) (1, 3)
(0, 3) expanderas till (0, 0) (4, 3) (3, 0)
etc.
Sökstrategi avgör vilken nod som skall expanderas
Köoperationer
Sökalgoritmer sparar noder som skall expanderas i en kö
Typiska köoperationer:
! empty?(queue)
! pop(queue)
! insert(element, queue)
Generell sökalgoritm
def treeSearch(problem):
frontier = insert(initialState(problem), frontier)
while true:
if empty?(frontier):
return failure
node = pop(frontier)
if goalTest(problem, state(node)):
return solution(node)
frontier = insert(expand(node, problem), frontier)
Nodexpansion
Värdering av sökstrategi
Expand(node, problem)
! Komplett
Skapa en lista av noder, s, som är efterföljare till en nod, n, där:
state[s] = tillståndet efter uförd legal handling i n
parent-node[s] = n
! hittar lösning om den finns
! Optimal
! hittar bästa lösningen
action[s] = handlingen som utfördes
! Tidsåtgång
vägkostnad[s] = vägkostnad[n] + kostnad från n till s
! Minnesåtgång
djup[s] = djup[n] + 1
Blind sökning
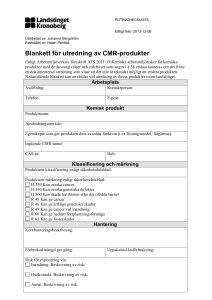
Bredden först
Ingen information om hur långt det är kvar till målet
! Expandera alla noder på en nivå innan nästa nivå
! Bredden först
1
! Uniform cost
2
! Djupet först
! Djupbegränsad sökning
! Iterativ fördjupning
3
4
8
5
9
10
6
11
12
7
13
14
15
! Dubbelriktad sökning
! Implementeras med insert som en FIFO-kö
Bredden först
Bredden först
! Komplett
Antag lösning på djupet d, då har vi expanderat:
! Optimal
1+b+b2+b3+b4+b5+………..bd noder
! Komplexitet ett problem
Vid komplexitetsanalys säger vi att vi har O(bd), dvs exponentiell
tillväxt
! Förgreningsfaktor b
! Sökdjup d
T
Ex b=2
d=0, en nod, b0
1
2
d=1, b1 noder
3
d
4
8
5
9
10
6
11
12
d=2, b2 noder
7
13
14
15
d=3, b3 noder
Bredden först, tids- och minneskomplexitet
Djup
Noder
2
110
4
Tid
Uniform Cost
Minne
0,11 ms
0,1 MB
11110
11 ms
10,6 MB
6
106
1.1 s
1 GB
8
108
2 min
103 GB
10
1010
3 timmar
10 TB
12
1012
13 dagar
1 PetaByte
14
1014
3,5 år
99 PetaByte
16
1016
350 år
10 ExaByte
Förgreningsfaktor = 10, 1 miljon noder/sekund, 1000 bytes/nod
! Om inte alla operatorer har samma kostnad
A
1
! Expandera billigaste vägen längs frontier
5
S
B
15
A
1
B
5
S
S
C
15
A
M
11
B
5
C
15
A
B
M
11
M
10
C
15
! Optimal och komplett om det inte finns negativa kostnader
! I princip O(bd) för tids- och minneskomplexitet
M
5
C
S
10
5
Djupet först
Djupet först
! Följer alltid en väg till slutet, om inte en lösning backa upp
! Kräver mindre minne, m*b där m=maxdjup.
! Jämför b=10,m=12, djupet först = 10*12=120, bredden först = 1012
1
2
4
8
1
3
2
1
3
3
! Samma tidskomplexitet O(bm)
! Inte optimal
3
! Inte komplett, kan dyka ner i en oändligt lång sökväg
5
9
1
5
10
6
11
12
7
13
14
15
! Implementeras med insert som en LIFO-kö, STACK
Djupbegränsad sökning
Iterativ fördjupning
! Lägg in ett maxdjup, l, för djupet först
! Låt sökdjupet, h, öka från 0 till det djup, d, där en lösning finns
! Tidskomplexitet fortfarande exponentiell, O(bl)
! Minneskomplexitet O(b*l)
h=0
! Inte komplett om man inte kan skatta ett sökdjup som
garanterar en lösning, jfr, rumäniengrafen, max 20 städer, dvs
l=20 ger komplett
! Inte optimal
h=3
h=1
h=2
Iterativ fördjupning
Dubbelriktad sökning
! Optimal och komplett
! Sök bredden-först från start och mål samtidigt
! Inte alltid möjligt
! Minneskomplexitet, O(b*d)
! Tidskomplexitet,
! Komplett och optimal
O(bd)
! Tids- och minneskomplexitet, lösning djup d
! Expanderar dock noderna flera gånger
! Bredden-först 1+b+b2+b3+b4+b5+………..bd
! 2bd/2, dvs O(bd/2)
! Iterativ fördjupning db+(d-1)b2+(d-2)b3+……+3bd-2+2bd-1+bd
! Ex b=10, d=6
! Men antal noder på nivå d många fler än resten
! Bredden först, O(bd) = 106 = 1000000
! Ex b=10, d=5
! Dubbelriktad sökning = 106/2 = 103 = 1000
! Bredden först: 1+10+100+1000+10000+100000=111111
! Iterativ födjupning: 50+400+3000+20000+100000=123450
Egenskaper hos sökstrategier
Kriterium
Undvika loopar
Bredden Uniform
först
Cost
Djupet Djupförst
begränsad
Iterativ
fördjupning
Dubbelriktad
sökning
Komplett?
Ja
Ja
Nej
Nej
Ja
Ja
Optimal?
Ja
Ja
Nej
Nej
Ja
Ja
Tid
O(bd)
O(bC*/ε)
O(bm)
O(bl)
O(bd)
O(bd/2)
Ex vattenhinksproblemet
(0,0)
(4,0)
(0,0)
(4,3)
(0,3)
(1,3)
(0,0)
(4,3)
(3,0)
! Generera inte tillstånd som är lika med fadertillståndet
! Generera inte vägar med cykler
Minne
O(bd)
O(bC*/ε)
O(bm)
O(bl)
O(bd)
O(bd/2)
! Behöver bara leta från noden som genererats upp till startnoden
! Generera inte ett tillstånd som genererats förut
! Varje tillstånd måste lagras i minnet, O(bd)
Heuristisk sökning
Greedy Search
! Antar att vi har någon information om vilken nod som är bäst att
expandera
! Minimera uppskattad kostnad till målet, dvs expandra den nod
som verkar vara närmast målet
! Greedy search
! Inför h(n)= heuristisk funktion som uppskattar kostnaden från
nod n till målet
! A*
! h(n) = 0 betyder att n är målnod
! IDA* och SMA*
! Ex Rumänienkartan
! Heuristik
! Fågelavståndet ett exempel på heuristik
! Hill Climbing
h(n)=
Arad
366 Bukarest
Fagaras
178 Giurgiu
77 Hirsova
0 Craiova
160 Dobreta
242 Eforie
161
151 Iasi
226 Lugoj
244
Mehadia
241 Neamt
234 Oradea
380 Pitesi
Sibiu
253 Tisioara
329 Urziceni
80 Vasliu
98 Rimnicu V.
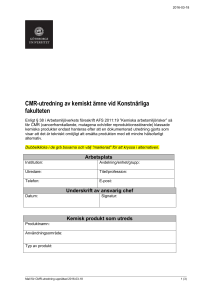
Greedy Search, Arad → Bukarest
193
199 Zerind
374
Arad
Oradea
Neamt
Zerind
Zerind (374)
Iasi
Arad
Sibiu
Fagaras
Oradera (380)
Vaslui
Fagaras (178)
Rimnicu Vilcea
Timisoara
Bukarest (0)
Pitesi
Lugoj
Urziceni
Bukarest
Mehadia
Dobreta
Sibiu (253)
Craiova
Giurgiu
Eforie
Timisoara (329)
Rimnicu Vilcea (193)
Greedy Search
A*
! Liknar djupet först och kan råka ut för samma problem
! Inte optimal
! Inför f(n) = g(n) + h(n), dvs tillryggalagd kostnad + uppskattad
återstående kostnad
! Inte komplett
! Kräv också att h(n) aldrig överskattar den verkliga kostnaden
! Tids- och minneskomplexitet O(bd) men kan ofta bli bättre med
god heuristik
! h(n) kallas då tillåten (admissible), ex fågelavståndet
! Jämför Uniform Cost
! Komplett och optimal men ineffektiv
! Inför g(n) för kostnad från start för nod n
h(n)=
Arad
366 Bukarest
Fagaras
178 Giurgiu
77 Hirsova
0 Craiova
160 Dobreta
242 Eforie
161
151 Iasi
226 Lugoj
244
Mehadia
241 Neamt
234 Oradea
380 Pitesi
Sibiu
253 Tisioara
329 Urziceni
80 Vasliu
98 Rimnicu V.
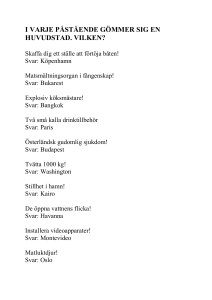
A*, Arad → Bukarest
193
199 Zerind
Arad
374
Oradea
Neamt
71
Zerind
151
75
Arad
140
87
Sibiu
Zerind
f(Zerind) = 75+374 = 449
Iasi
Sibiu
f(Sibiu) = 140+253=393
92
99
Fagaras
Vaslui
Oradera (140+151+380=671)
Fagaras (140+99+178=417)
Timisoara
f(Timisoara) = 118+329=447
Rimnicu Vilcea (140+80+193=413)
118
Timisoara
80
Rimnicu Vilcea
97
111
98
Pitesi
Lugoj
85
70
146
Mehadia
75
Dobreta
142
211
120
138
101
Urziceni
Bukarest (140+99+211+0=450)
86
Bukarest
Bukarest (140+80+97+101+0=418)
90
Craiova
Giurgiu
Pitesi(140+80+97+98=415)
Eforie
Craiova
(140+80+146+160=526)
Craiova
(140+80+138+160=518)
A* är optimal
Evalueringsfunktionen i A*
! Antag: lösningsnoden G optimum med kostnad f* och
G2 lösning men med kostnad g(G2) > f*
f(n) = g(n) + h(n)
g(n) = 0 → Greedy search
där
h(n) = 0 → Uniform Cost
f(n) = totalkostnad
g(n) = 1 och h(n) = 0 → f(n) = 1,
dvs Bredden först
! För att A* skall välja G2 måste det finnas en nod, n, på vägen till
G som inte expanderats
n
G2
G
g(n) = kostnad hittills
h(n) = uppskattad återstående
kostnad (måste underskatta)
! f* ≥ f(n) eftersom h aldrig överskattar (tillåten)
! f(n) ≥ f(G2) eftersom A* expanderat till G2
! dvs f* ≥ f(G2)
! Eftersom G2 målnod så h(G2) = 0
f(G2) = g(G2)
dvs f* ≥ g(G2) vilket motsäger antagandet
Heuristik
Heuristik, 1
! Heuristiska sökmetoder bättre med bättre heuristik, dvs bättre
skattning av kostnaden
! Antal brickor som ligger fel
1
Ex. 15-spel
1
2
3
2
3
4
2
3
4
5
5
6
6
5
6
6
9
7
9
10
7
13
11
14
14
4
4
7
9
5
8
13
1
8
8
11
3
2
1
10
7
13
12
10
9
12
11
11
14
14
12
10
12
15
15
8
15
15
13
12: (1,3,4,5,6,7,8,9,10,11,12,13,14,15)=14
8: (1,3,4,5,6,7,8,9,10,11,13,14,15)=13
Heuristik, 2
Hill Climbing
! Mahattanavståndet
1
2
3
5
3
6
9
7
9
10
7
13
5
! Om varje nytt tillstånd innehåller all nödvändiginformation för att
gå vidare, dvs vi kan utvärdera en nod utan hänsyn till varifrån
vi kom och vägen mindre viktig
8
13
11
11
14
14
4
2
6
4
S
1
12
10
3
12
2
15
15
8
10
12: 4+0+2+1+4+1+3+3+2+1+1+1+4+1+1=29
13
23
12
15
8: 4+0+2+1+4+1+3+2+2+1+1+0+4+1+1=27
30
Hill Climbing
Problem för hill climbing
def hillClimbing (problem):
Lokal metod, hittar lokalt optimum
current = makeNode(initialState(problem))
while True:
next = highestValuedSuccessor(current)
if (value next) <= (value current):
return current
current = next
Lokalt
maximum
Platå
Globalt
maximum
Ås
Constraint satisfaction
Ex. trefärgsproblemet
Givet:
Färga varje stat:
• Tre färger
• Grannstater olika färg
! En mängd variabler X1,X2,….Xn
! Med värden vi till Xi ur domänen Di
! En mängd begränsningar C1,C2,…Cn
! Som talar om vilka värden som är tillåtna
Mål:
! En tilldelning {Xi=vi, Xj=vj …} som är konsistent med
begränsningarna
Constraint satisfaction sökning
Algoritm
! Bredden först skulle tilldela varje variabel ett värde generera ett
stort sökträd
! Eftersom ordningen saknar betydelse kan man istället tilldela
en variabel ett värde och sen backa tillbaka om det inte blev bra
start
NT=Röd
Q=Röd
SA=Röd
SA=Blå
Q=Blå
SA=Grön
NT=Blå
Q=Grön
Ex.
{(WA=grön),(NT=blå),
(Q=grön),(NSW=blå),
(SA=röd),(V=grön),(T=blå)}
NT=Grön
def backtrackingSearch(csp):
return recursiveBacktracking([ ], csp)
def recursiveBacktracking(assignment, csp):
if complete(assignment):
return assignment
var = selectUnassignedVariable(variables(csp),assignment,csp)
for value in orderDomainValues(var,assignment,csp):
if consistent(value,assignment,constraint(csp)):
add {var=value} to assignment
result = recursiveBacktracking(assignment,csp)
if result != failure:
return result
remove {var=value} from assignment
return failure
Algoritm
Algoritm, forts
! Variabler = [NT, Q, NSW, SA, V, T, WA]
! väljer nytt värde i for-loopen assignment = {Q=blå}
! Värden = [Röd, Blå, Grön]
! recursiveBacktracking({NT=röd, Q=blå}, csp}
! Initialt assignment = { }
! etc
! selectUnassignedVariable väljer variabel
! {NT=röd, Q=blå, NSW=grön}
! Ex var = NT
! orderDomainValues väljer värden enligt någon heuristik
! Ex assignment = {NT = röd}
! Nytt anrop recursiveBacktracking({NT=röd}, csp})
! var=SA går inte utan det rekursiva anropet ger ett failure
! remove {var=value} from assignment tar bort något
värde, t.ex. det sista NSW=grön och sen fortsätter algoritmen
med ny variabel
! selectUnassignedVariable väljer var = Q
! orderDomainValues väljer röd. Inte konsistent
Heuristik
Spelförande program
! Val av variabel och värde
! Minimax
! selectUnassignedVariable bör välja den variabel som är
mest begränsad och först väljs den som har flest begränsningar, SA
! orderDomainValues välj det minst begränsande värdet
! Constraint propagation
! Propagera effekten av en variabels begränsningar till de andra
variablerna
! Backtrackingstrategier
! Ta bort det värde, eller den variabel, som orsakade konflikten
! Evalueringsfunktioner
! alfa-beta cutoff
Minimax
Ett sökträd
Max
X
X
X
X
X
8
4
5
X
X
X
X
Min
O
X
X
O
O
X
X O
X
X O
e(x, , ,x,o, , , , )=4-4=0
X
X
X O
O
X
e( ,x, ,x,o, , , , , )=0
3
5
O
Max
X O
8
4
8
9
4
5
9
6
3
9
9
X
e( , , ,x,o, , , ,x)=4-3=1
Applicera evaluaeringsfunktion, t.ex.:
e(p)=n(vinstdrag för mig) – n(vinstdrag för motståndaren)
Evalueringsfunktion
8 7 2 9 1 6 2 4 1 1 3 5 3 9 2 6 5 2 1 2 3 9 7 2 9 6 4
alfa-beta cutoff, 1
n
! Linjär
e( p) = ∑ wi fi
i=0
! Ex: e(p)=1*n(vinst för mig)-1*n(motståndarvinst)
e(p)=π*n(vinst för mig)-2,18*n(motståndarvinst)+1*n(diagonaler)
n
! Icke-linjär
e( p) = ∏ fi 2
i=1
! Inlärning
! Vikter och funktioner lärs in automatiskt utifrån gamla spel
! Credit assignmentproblemet
Två tröskelvärden α och β:
! α representerar det lägsta värdet en maxnod kan få, dvs en
undre gräns för MAX
! β representerar det högsta värdet en minnod kan få, dvs en
övre gräns för MIN
alfa-beta cutoff, 2
Ett sökträd
! Initiering:
! α = sämsta värdet; β = bästa värdet
Max
8
5
4
! Tilldelning:
! α = bästa efterföljare hitills, på MAX-nivå
! β = sämsta efterföljare hitills, på MIN-nivå
Min
4
8
3
5
! Regler:
! Avbryt MIN-sökning vid nod med värde mindre än α
! Avbryt MAX-sökning vid nod med värde större än β
Max
8
8 7 2 9
9
4
5
9
2 4 1 1 3 5 3 9
6
6
3
1 2 3