Stångbärverk - TFE-Moodle 2
advertisement

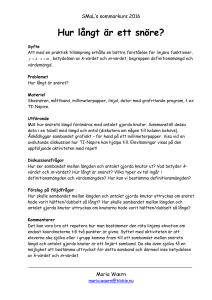
Umeå universitet Tillämpad fysik och elektronik Staffan Grundberg Laboration 14 mars 2014 Stångbärverk Hållfasthetslärans grunder Civilingenjörsprogrammet i teknisk fysik Stångbärverk 0 Knut 3 Knut 2 −0.1 −0.2 −0.3 y/ L −0.4 −0.5 2 1 3 Knut 1 1 −0.6 −0.7 −0.8 −0.9 −1 Knut 4 0 0.2 0.4 0.6 0.8 x/ L Figur 1. I figuren finns ett stångbärverk med en rörlig knut (1) och tre fixerade (2-4) avbildat. 1. Inledning Ett stångbärverk består av ett antal stänger sammankopplade i momentfria leder, så kallade knutar. Ett enkelt exempel på ett stångbärverk hämtat från Dahlberg [1] finns avbildat i figur 1 I figur 2 finns en stång i ett bärverk med knutar i punkterna r respektive r′ i obelastat tillstånd avbildad. När stångbärverket belastas, kommer denna stång i bärverket att utsättas för en axiell kraft N, men inget moment eftersom knutarna antas vara momentfria. Den axiella kraften N antas vara positiv om den pekar i den utåtriktade normalens riktning vid ett internt snitt enligt figur 2. Med andra ord är N positiv om stången utsätts för en dragkraft. När stångbärverket belastas kommer knutarna vid r och r′ att förskjutas till r + ∆r respektive r′ + ∆r′ . Stångens längd i det deformerade tillståndet blir då l + ∆l = r + ∆r − r′ + ∆r′ r − r′ ′ · ∆r − ∆r , ≈ r − r′ + |r − r′ | (1) där approximationen förutsätter att deformationerna är små. Stångens längdändring vid belastning kan alltså skrivas ∆l = n̂ · ∆r − ∆r′ , (2) där n̂ = r − r′ |r − r′ | 1 (3) Stångbärverk l = r − r′ Tänkt snitt r′ N n̂ −N n̂ r Figur 2. I figuren avbildas en stång i ett bärverk med momentfria leder. Stångens ändpunkter, som ansluter till två knutar, betecknas r respektive r′ . Vektorn l = r − r′ sammanbinder stångens ändpunkter och vektorn n̂ är en enhetsvektor som är parallell med l och stången. Görs ett tänkt snitt i stången kommer krafterna på snittytorna att vara N n̂ respektive −N n̂. är en enhetsvektor parallell med stången, se figur 2. Stångens töjning ∆l , l (4) σ + α ∆T, E (5) ε≡ ges av den konstitutiva ekvationen Hookes lag ε= där σ är (normal)spänningen, materialparametrarna E och α är stångens elasticitetsmodul respektive längdutvidgningskoefficient, samt ∆T = T − T0 är temperaturändringen. Kombineras de kinematiska och konstitutiva sambanden, så erhålls normakraften i stången n̂ · (∆r − ∆r′ ) − α ∆T , (6) N = EA l där A betecknar stångens tvärsnittsarea. 1.1. Exempel Låt oss betrakta exemplet i figur 1 för fallet då knut 1 utsätts för en vertikal last F1 = −Pŷ (7) och stängerna √har alla samma axialstyvhet EA. Stängerna 1 och 3 har längden L, medan stång 2 har längden 2L. Temperaturen antas vara konstant, d.v.s. ∆T = 0. Kraftjämvikt i x-riktningen för nod 1 ger jämviktsekvationen √ √ 1 (∆x1 / 2) − (∆y1 / 2) ∆x1 √ − √ EA = 0, (8) − EA L 2 2L medan (kraft)jämvikt i y-riktningen ger √ √ ∆y1 1 (∆x1 / 2) − (∆y1 / 2) √ −EA + √ EA − P = 0. L 2 2L 2 (9) Stångbärverk De två jämviktsekvationerna kan skrivas EA L EA L ! √ ∆y1 1+2 2 √ ∆x1 − √ = 0 2 2 2 2 ! √ ∆x1 1 + 2 2 √ ∆y1 − √ + = −P, 2 2 2 2 (10) (11) vilket kan skrivas på matrisform där K är styvhetsmatrisen EA K= √ 2 2L Ku = f, (12) √ −1√ 1+2 2 ; −1 1 + 2 2, (13) förskjutningarna ges av u= och den externa kraften av ∆x1 ∆y1 0 f= . −P Genom att lösa ekvationssystemet kan knutens förskjutning vid jämvikt beräknas PL 1√ ∆x1 u= =− √ 1+2 2 , ∆y1 2EA 1 + 2 och detta ger att axialkrafterna i stängerna blir √ 1+2 2 P N1 = √ 2 1+ 2 √ 2P N2 = √ 2 1+ 2 P N3 = − √ . 2 1+ 2 (14) (15) (16) (17) (18) (19) 2. Knutpunktsförskjutningar I fallet med ett stångbärverk med flera rörliga knutar och där stängerna utsätts för temperaturändringar, så ges knutpunkternas förskjutningar ∆x1 ∆y1 ∆x2 u = ∆y2 (20) .. . ∆xn ∆yn 3 Stångbärverk av jämviktsekvationerna Ku = f + fT , (21) där f innehåller de yttre krafterna och fT är en (kraft)term som härrör från de termiska töjningarna. 3. Bivillkor Ett exempel på bivillkor är om någon eller några av de inre noderna är placerade på stöd, som är fritt rörliga i endast en riktning. Då uppkommer reaktionskrafter, som är vinkelräta mot den fria riktningen, från stöden. Dessa krafter ger ett bidrag till de yttre krafterna i ekvation (21), som sedan löses tillsammans med bivillkoren. Ett annat sätt att lösa problemet är att minimera den fria energin 1 F (T, u) = F0 (T0 ) + uT Ku − uT (f + fT ) , 2 (22) under de p linjära bivillkoren Cu = 0, (23) där C är en p × 2n matris. Detta ger ett ekvationssystem Ku − (f + fT ) = CT λ Cu = 0, där λ = λ1 λ2 .. . λp (24) (25) är en vektor innehållande Lagrangemultiplikatorerna λ1 , . . . , λ p. Ekvationssystemet kan skrivas på kompakt form som Ax = b, (26) där K −CT A= C 0 u x= λ och b= f + fT 0 , (27) (28) . (29) 4. Frågor 1. Beräkna knutpunktsförskjutningarna och axialkrafterna för stångbärverket i figur 1 om stånglängderna ges av L = 1 m; alla stänger har samma axialstyvhet AE = 21 MN och stång 2 utsätts för en termisk töjning α2 ∆T2 = 10−5 . Endast knut 1 är rörlig. 4 Stångbärverk 2.5 Knut 6 8 Knut 4 4 Knut 2 12 11 9 7 5 3 1 13 Knut 7 10 Knut 5 6 Knut 3 2 14 15 2 y (m) 1.5 1 Knut 8 0.5 0 Knut 9 Knut 1 Knut 10 −0.5 0 0.5 1 1.5 2 x (m) 2.5 3 3.5 4 Figur 3. I figuren finns ett stångbärverk med sju rörliga knutar (1–7), och tre fixerade (8–10). 2. Knut 1 i stångbärverket i figur 3 utsätts för en nedåtriktad kraft på 1 kN. Beräkna knutpunktsförskjutningarna och krafterna i stängerna. Axialstyvheterna är AE = 21 MN. 3. Knutarna 2 och 4 i stångbärverket i figur 4 placeras i obelastat tillstånd på stöd, vilket medför att de endast kan röra sig i horisontell riktning. Beräkna knutpunktsförskjutningarna och reaktionskraften från stöden vid knutarna 2 och 4. Knut 3 utsätts för en nedåtriktad kraft på 1 kN. Axialstyvheterna är AE = 21 MN. 5. Redovisning Redovisa lösningarna på problemen ovan i en individuell rapport. Rapporten ska innehålla en inledande teoridel, ett metodavsnitt där beräkningsalgoritmen beskrivs, en resultatdel där resultaten beskrivs, samt diskussion och slutsatser. Koden bifogas rapporten i en bilaga. Rapporten laddas upp i Moodle. Referenser [1] Tore Dahlberg. Teknisk hållfasthetslära. Studentlitteratur, 2001. 5 Stångbärverk 1.5 Knut 1 y (m) 1 7 0.5 0 Knut 5 6 5 3 Knut 4 4 1 Knut 3 2 Knut 2 −0.5 0 0.5 1 1.5 x (m) 2 2.5 3 Figur 4. I figuren finns ett stångbärverk med två rörliga knutar (1 och 3), en fixerad (knut 5) och slutligen två (knutarna 2 och 4) som är fritt rörliga i horisontell led (x-led), men fixerade i vertikal led (y-led). 6