Linjär algebra
advertisement

Linjär algebra
• Föreläsningar: 08.15-10.00
• Lektioner: 10.30-12.00
• Laborationer: 13.15-16.00
Datum
Må 1/9
To 4
Lektion
Må 8
To 11
Lektion
Må 15
Lektion
Må 22
On 24
To 25
Lektion
Må 29
On 1/10
Lektion
Må 6
Laboration
Må 8
To 9
Lektion
Må 13
Laboration
On 15
Laboration
To 16
Lektion
Må 20
On 22
To 23
Lektion
Må 27
Lektion
To 30
Lö 13 Dec
Sal
Hörsal D
D
MA136, 146, 156, MC313
D
D
MA136, 146, 156, MC313
D
MA378, N330, N335, Na326
D
A
D
MA346, 356, MC313, Ub336
D
D
MA346, 146,156, MC313
D
Ma 141, Ma 151
D
D
MA136, 146,156, 166
D
Ma 141, Ma 151
D
Ma 141, Ma 151
D
MA136, 146,156, 166
D
D
E
MA136, 146,156, 166
E
MA136, 146,156, 166
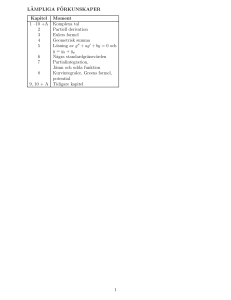
Kapitel
1.1-1.2 Ekvationssystem
1.3-1.4 Matriser
Hörsal E och G
Östra paviljongerna Sal 6
Tentamen 09.00–15.00
Omtentamen 09.00–15.00
1.5-1.7 Inversa matriser
2.1-2.3 Determinanter
3.1-3.2 Euklidiska vektorrum
3.3-3.4 Ortogonalitet
3.5 Vektorprodukt
4.1-4.2 Reella vektorrum
4.3-4.4 Linjärt oberoende, baser
4.5 Dimension
4.6-4.8 Basbyte, rang
4.9-4.10 Matris-transformationer
5.1-5.2 Egenvärden, egenvektorer
6.1-6.2 Inre produktrum
6.3 Gram-Schmidt-ortogonalisering
6.4 Minsta kvadratmetoden
7.1-7.2 Ortogonal diagonalisering
7.3 Kvadratiska former
Tillämpning
Repetition
Föreläsare: Klas Markström
Litteratur: Anton, Rorres, Elementary Linear Algebra 11e utgåvan
Gruppindelning:
• Grupp 1: Klas Markström: Lärare och fristående kurs
• Grupp 2: Emelie Wibron: Interaktion och design med efternamn fram till
och med J
• Grupp 3: Matilda Berglund: Interaktion och design med efternamn från
och med K
• Grupp 4: Peter Fransson: Teknisk datavetenskap och kandidatprogrammet i datavetenskap
1 Linjära ekvationssystem och matriser
1.1 Introduktion
Linjära ekvationer med tre obekanta x, y och z kan tolkas som ekvationer för
plan i rummet. Att söka lösningar till ett ekvationssystem med tre ekvationer
och tre obekanta kan därför tolkas som att vi söker gemensamma punkter till
planen.
Facktermer och definitioner:
• konsistent - consistent - motsäagelsefritt (här: lösbart ekvationssystem)
• inkonsistent - inconsistent - icke motsägelsefritt (här: icke lösbart ekvationssystem)
• utökad matris - augmented matrix - (för ett ekvationssystem)
• De tre elementära radoperationerna används i nästan varje uppgift i hela
kursen.
Lämpliga uppgifter: 1, 3ab, 5, 9, 11ab, 13ab
1.2 Gausselimination.
Här löses ekvationssystem enligt Gauss-metoden. Det innebär att man reducerar
det linjära systemets utökade matris till reducerad trappstegsform (reduced rowechelon form).
Facktermer och definitioner:
• parameter
• homogent ekvationssystem
• trivial lösning
• icke-trivial lösning.
Lämpliga uppgifter: 15, 17, 19, 21, 31, 35, 38, 40
1.3 Matriser och matrisoperationer.
Facktermer och definitioner:
• rad - row
• kolonn - column
• skalär - scalar vanligt reellt (eller komplext) tal
• den transponerade matrisen A = AT - the transpose of A = AT :
• matrismultiplikation AB, A och B matriser
• multiplikation med skalär, λA,d är λ är ett tal och A en matris.
Lämpliga uppgifter: 57ab, 59a–i, 69, 75
1.4 Regler för matrisräkning
Det är viktigt att komma ihåg att vissa räknelagar som gäller för reella tal inte
gäller för matriser
1. För matriser A och B så är i allmänhet AB 6= BA
2. För matriser så kan man ha AB = 0 trots att ingen av A och B är
nollmatrisen.
Facktermer och definitioner:
• nollmatrisen - the zero matrix
• enhetsmatrisen (identitetsmatrisen) - the identity matrix
• invers
• inverterbar matris
Viktiga satser att lära sig: 1.4.4 (med bevis), 1.4.5 (utan bevis), 1.4.6 (med
bevis), 1.4.7 (utan bevis), 1.4.9 (utan bevis).
Lämpliga uppgifter: 90, 91, 95, 96, 103, 118
1.5 Elementära matriser och en metod för att hitta matrisinversen
Här skall du kunna begreppet elementär matris och satserna 1.5.2 och 1.5.3 med
bevis av a → b. Sats 1.5.3 är en av bokens huvudsatser. Dessutom skall
du lära dig att avgöra om en matris är inverterbar och ta fram inversen.
Viktiga satser att lära sig: 1.5.2, 1.5,3.
Lämpliga uppgifter: 128, 132, 136, 138, 141, 149, 152
1.6 Ekvationssystem och inverterbarhet
Sats 1.6.1 diskuterades i kapitel 1.1. Här formuleras och bevisas resultatet.
Beviset ingår bland de saker ni skall kunna innan avklarad kurs.
Därefter behandlas ekvationssystem med lika många ekvationer som obekanta.
Studera satserna 1.6.1 och 1.6.2 och exempel och sammanfattningen i Sats 1.6.4.
Lämpliga uppgifter: 165, 166, 167, 170i-ii, 174, 177
1.7 Diagonalmatriser och symmetriska matriser
Facktermer och definitioner:
• diagonalmatris
• triangulär matris
• symmetrisk matris
Lämpliga uppgifter: 187, 193, 199, 203
2 Determinanter
2.1 Utveckling i underdeterminanter
Facktermer och definitioner:
• Underdeterminanten Mij – the minor of entry aij
• Kofaktorn Cij = (−1)i+j Mij – the cofactor of entry aij
Du ska kunna tillämpa sats 2.1.1 och 2.1.2 vid determinantberäkning.
Lämpliga uppgifter: 3, 9, 10, 15ab, 20, 21, 23, 27
2.2 Beräkning av determinanter genom radreduktion
För att kunna beräkna determinanter för du lära dig följande
1. det(A) = 0 om A har en rad, eller en kolonn, som enbart består av nollor.
2. Räknereglerna för determinanter i sats 2.2.2-2.2.5
Lämpliga uppgifter: 37, 41, 47, 49,
2.3 Cramers regel
Facktermer och definitioner:
• adjungerad matris
Här bör du kunna lydelsen av sats 2.3.3 och 2.3.4. Läs också igenom exempel
4. Sats 2.3.5 ingår med bevis. Läs exempel 6. Ekvationssystem kan lösas med
Cramers regel, du bör kunna använda Cramers regel, Sats 2.3.7. Här studerar
vi inte beviset! Vi observerar att det(A), determinanten för ekvationssystemets
koefficientmatris, finns i nämnaren till alla xn : Här ser vi alltså att det(A) 6=
0 ⇔ ekvationssystemet Ax = b har entydig lösning (jfr Sats 2.3.6). En god
sammanfattning finns i Sats 2.3.8.
Lämpliga uppgifter: 71, 74, 76, 84, 99
3 Euklidiska vektorrum
Detta kapitel innehåller vektorer, koordinater, vektorräkning, längd- och normbegrepp, skalär- och vektorprodukt, räta linjer och plan, m.m. Här utvidgas
också begreppen från R2 och R3 till den n-dimensionella Euklidiska rymden.
Kapitlet innehåller en hel del stoff att ge tentamensproblem på!
3.1 Introduktion till vektorer
Läs igenom hela detta avsnitt! Vektorer har du tidigare träffat på i fysikstudierna och som koordinater i planet. Studera alla 14 figurerna i 3.1 och rita
själv! Lär dig formlerna i satserna 3.1.1 och 3.1.2 medan du räknar övningsuppgifterna.
Lämpliga uppgifter: 1, 2, 5, 7, 9, 15, 19, 30
3.2 Norm, skalärprodukt och avstånd
Facktermer och definitioner:
• Normen för en vektor i Rn
• skalärprodukt (euklidisk inre produkt) – dot product
• vinkeln mellan två vektorer
Sats 3.2.1 är viktig för vektorer och skalärer. Normen för en vektor och
avståndsformeln i Rn är viktiga. Definitionen av skalärprodukt (Euklidisk inre
produkt) är mycket viktig. Räknereglerna för skalärprodukt står i Sats 3.2.2
och 3.2.3. Studera exempel 6. Lär dig Sats 3.2.4, den berömda Cauchy-Schwarz
olikhet, i Rn med bevis för n = 2 och 3.
Lämpliga uppgifter: 35, 37, 39, 41, 43, 45, 48, 51, 52, 58, 63
3.3 Ortogonalitet
Facktermer och definitioner:
• Ortogonala (vinkelräta) vektorer
• punk-normalform
Du skall kunna härleda punkt-normalformen för en linje och ett plan, Sats
3.3.1. Här lär man sig alltså att skriva ekvationer för räta linjer i R2 och plan
i R3 på punktnormalform samt att räkna ut det minsta (vinkelräta) avståndet
mellan en punkt och en linje R2 och en punkt och ett plan i R3. Projektionssatsen 3.3.2 och Pythagoras sats i Rn , Sats 3.3.2 är viktiga.
Lämpliga uppgifter: 65ab, 67, 71, 73, 75, 77, 81, 83, 89, 97
3.4 Linjära system
Linjens ekvation ppå parameterform, Sats 3.4.1, skall man både kunna, och
kunna härleda! Räta linjen definieras på s. 147 och linjesegment på s. 150.
Lämpliga uppgifter: 111, 113, 119, 127, 135
3.5 Vektorprodukt
Facktermer och definitioner:
• vektorprodukt (kryssprodukt) – cross product u × v för u och v i Rn
beräknas enklast med determinantformlen från sidan 156.
• Enhetsvektorerna e1 = i = (1, 0, 0), e2 = j = (0, 1, 0), e3 = k = (0, 0, 1),
Studera figur 3.5.3 noga, den visar vad vektorn u × v får för riktning. Arean
av parallellogrammen i figur 3.5.4 är |u × v|. Satserna 3.5.4 och 3.5.5 skall du
kunna lydelsen av.
Lämpliga uppgifter: 139, 141, 145, 151, 153, 154, 156, 158
4 Allmänna vektorrum
4.1 Reella vektorrum
Facktermer och definitioner:
• Vektorrum (rum – space)
Sats 4.1.1 ingår med bevis.
Lämpliga uppgifter: 1, 3, 5, 7, 9, 11
4.2 Underrum
Facktermer och definitioner:
• underrum – subspace
• linjärkombination
• linjärt hölje av vektorer – linear span
Lär dig definitionerna och läs exemplen. Sats 4.2.3(a) ingår med bevis. På sid.
180 finns definitionen av linjärkombination. Läs exemplen!
Vektorrum som spänns upp av {v1 , v2 ..., vr }, W = span{v1 , v2 ..., vr } kallas
på svenska det linjära höljet av {v1 , v2 ..., vr }. En geometrisk illustration finns
i exempel 12.
Lämpliga uppgifter: 24, 26, 30, 32ab, 34, 37, 38abc,
4.3 Linjärt oberoende
Facktermer och definitioner:
• linjärt oberoende
• linjärt beroende
Läs definitionen och exempel 1–5. Den geometriska tolkningen finns på sid. 191.
Satserna 4.3.1, 4.3.2 och 4.3.3 ingår.
Lämpliga uppgifter: 45, 47, 49, 51, 59
4.4 Koordinater och baser
Facktermer och definitioner:
• bas till ett vektorrum
• koordinater med avseende på en bas
Nu kan vi ge en exakt definition av begreppet dimension. Läs igenom inledningen, där man visar upp olika koordinatsystem i plan och rymd, rätvinkliga och
sneda. Lär dig sats 4.4.1 (med bevis).
Lämpliga uppgifter: 66ab, 68, 72ab, 74, 78, 80
4.5 Dimension
Facktermer och definitioner:
• dimension
Läs Sats 4.5.1 och den därpå följande definitionen av dimension. Sats 4.5.2
används för att bevisa 4.5.1.
Lämpliga uppgifter: 84, 86, 90, 93, 99
4.6 Basbyte
Facktermer och definitioner:
• överföringsmatris (basbytesmatris) – transition matrix
Basbytesproblemet i R2 löses på s. 209-210. Lär dig metoden! Matrisen IBB 0 =
PB 0 →B kallas överföringsmatrisen från den nya basen till den gamla, dvs från
B 0 till B.
Läs exemplen och satserna 4.6.1 och 4.6.2.
Lämpliga uppgifter: 104, 106, 108ab, 109, 110, 111
4.7 Radrum, kolonnrum och nollrum
Facktermer och definitioner:
• radrum – row space
• kolonnrum- column space
• nollrum –null space
Lär dig satserna 4.7.1 - 4.7.5. och 5.5.4. Sats 4.7.1 med bevis.
Lämpliga uppgifter: 131abe, 133, 135, 136, 137ad, 138ab
4.8 Rang och nollrummets dimension
Facktermer och definitioner:
• nollrummets dimension – nullity
• värderummets dimension, rang – rank
• ortogonalt komplement
Dimensionssatsen för matriser, sats 4.8.2 med bevis liksom sats 4.8.8. Sats
4.8.10 utgör en bra sammanfattning.
Lämpliga uppgifter: 147, 148abe, 149 abe, 151, 153, 155, 159
4.9 matrisavbildningar från Rn till Rm
Facktermer och definitioner:
• En funktion y = f (x) är en regel som till varje element x i en mängd X
tilldelar exakt ett värde y i en annan mängd W
• X kallas f s definitionsmängd – the domain of f
• W kalls målmängden eller kodomänen till f – the codomaı́n of f
• Värdemängden f (X) är alla y i W så att det finns något x med y = f (x)
— the range f (X) of f
• En transformation är en funktion där både defintionsmängden och målmängden
är vektorrum.
Läs om hur man ställer upp en matris till en avbildning, s. 235 - 246. (Tips:
Läs exemplen!)
Lämpliga uppgifter: 165, 167, 169, 173, 179, 181, 183
4.10 Egenskaper hos matrisavbildningar
Facktermer och definitioner:
• 1-1 avbildning (bijektion) – one-to-one transformation
Sammansättning av linjära avbildningar motsvaras av matrismultiplikation.
Sats 4.10.1 säger att en matris A har invers är ekvivalent med att TA (x) = Ax
är en 1-1-avbildning. Satsen är viktig! Satserna 4.10.2 och 4.10.3 ingår..
En bra sammanfattning av vad du har lärt dig så här långt i kursen finns i
Sats 4.10.4.
Lämpliga uppgifter: 200, 202. 204. 207, 210, 211
5 Egenvärden och egenvektorer
5.1 Egenvärden och egenvektorer
Facktermer och definitioner:
• karakteristisk ekvation,
• egenvärde – eigenvalue
• egenvektor – eigenvector
Satserna 5.1.1, 5.1.2 och 5.1.3 ingår. Observera sats 5.1.4 och inte minst sats
5.1.5. Ekvivalenssatsen får några rader till i formuleringen i sats 5.1.6.
Lämpliga uppgifter: 3abd, 4abd, 5abd, 6, 8, 15
5.2 Diagonalisering
Du skall kunna redogöra för Egenvektorsproblemet och Diagonaliseringsproblemet. Satserna 5.2.1, 5.2.2 och 5.2.3 ingår med bevis. Beviset av sats 5.2.1.
ger en metod för att diagonalisera matriser.
Lämpliga uppgifter: 30, 34, 36, 38, 42, 44, 46, 48, 49, 52
6 Inre produktrum
6.1 Inre produkt
Facktermer och definitioner:
• inre produkt
• norm eller längd av en vektor – norm of a vector
Studera exempel 1 och 2.
Lämpliga uppgifter: 1, 5, 9, 28
6.2 Vinklar och ortogonalitet
Facktermer och definitioner:
• vinkel mellan två vektorer i ett inre produktrum
Lär dig Cauchy-Schwarz olikhet, Sats 6.2.1 och innehållet i de grå rutorna. Dessa
samband leder fram till ett vinkelbegrepp mellan vektorer, t.ex. ortogonalitet,
som fungerar i ett inre produktrum. Se grå rutan s 343 och definition 1 och
exempel 4 s. 344. Sats 6.2.1 ingår med bevis och satserna 6.2.4 och 6.2.5 utan
bevis.
Lämpliga uppgifter: 33bd, 35b, 41, 43, 45, 47
6.3 Ortogonala baser, Gram-Schmidts metod
Facktermer och definitioner:
• ortogonal bas
• ortonormal bas
Läs exempel 1 och 2. Sats 6.3.2 (b) ingår med bevis. Läs igenom exempel
3 och Sats 6.3.3. I beviset av Sats 6.3.5 ges en metod för att konstruera en
ortogonal (ortonormal) bas. Metoden finns beskriven på sid. 354. du skall
kunna genomföra Gram-Schmidts ortogonaliseringsprocess. Läs också exempel
7 och exempel 8 innan du gör övningarna.
Lämpliga uppgifter: 65ab, 67, 69, 71ab, 73a, 77a, 79a, 84, 86, 96
6.4 Minsta kvadrat-metoden
Läs om minsta-kvadrat-problemet. Sats 6.4.1 med bevis och sats 6.4.2 ingår.
Läs exempel 1 och 2.
Lämpliga uppgifter: 98. 100, 102, 104b, 113
7 Diagonalisering och kvadratiska former
7.1 Ortogonala matriser
Facktermer och definitioner:
• ortogonal matris
• ortogonal operator
Läs igenom exemplen och satserna. Sats 7.1.1 ingår med bevis. Lydelsen av
satserna 7.1.2 och 7.1.3 ingår.
Lämpliga uppgifter: 1 3bcd, 7bcd, 11, 13
7.2 Ortogonal diagonalisering
Läs om frågeställningarna på s 396 och svaret i Sats 7.2.1. Satserna 7.2.1 och
7.2.2 ingår med de bevis som finns i boken. Metoden för att hitta en ortogonal
diagonalisering av en matris finns på s. 398.
Lämpliga uppgifter: 22abcd, 24, 26, 28. 30
7.3 Kvadratiska former
Läs om kvadratiska former och problemställningarna på s.403-404. Svar finns
i principalaxelsatsen 7.3.1. Läs exemplen. Målet är att kunna avgöra om ett
kägelsnitt är en ellips, parabel eller hyperbel och motsvarande för ytor i tre
dimensioner.
Lämpliga uppgifter: 41, 43, 45, 47, 51, 53, 54