Användning av satellitdata och HF-radar för att mäta ytströmmar
advertisement

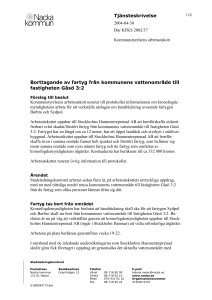
Användning av satellitdata och HF-radar för att mäta ytströmmar samt detektera fartyg i Skagerrak Bakgrund Möjligheten att kunna mäta havsströmmar längs svenska kusten är idag mycket begränsad. Det finns ett fåtal förankrade bojar som kan mäta strömmar, men de ger bara värdet på de platser där de befinner sig. Med en radar som arbetar på kortvågsbandet (HF-radar) kan man mäta ytströmar över ett större område. Detta ger möjlighet att förbättra de datormodeller som beräknar havsströmmar, temperatur och vattenstånd. Bättre och mer exakta modeller ger också större möjlighet att göra avdriftsprognoser för till exempel oljeutsläpp eller en tappad container. Möjligheten att hitta en person som fallit överbord ökar också om man kan begränsa sökområdet, men det förutsätter att man har tillförlitlig data över rådande havsströmmar. Havsströmmar kan mätas indirekt med hjälp av satellit, när dessa passerar över ett visst havsområde. Men för att kunna verifiera att data man får från satelliter är riktig, behöver man kunna jämföra den med andra data från samma område. Att använda HF-radar ger möjlighet att få in data över havsströmmar närmast kusten. Radarns räckvidd är upp till 200 km. En begränsning hos radarn är att den fungerar sämre om vattnets salthalt är lägre, till exempel i Östersjön. En möjlighet här är dock att använda satellitdata för Östersjön, vars beräkningsalgoritmer verifierats i områden där HF-radar kunnat användas. En annan tillämpning på HF-radar är att kunna detektera fartyg på större avstånd än vad vanlig mikrovågsradar tillåter. Detta är möjligt tack vare att HF-radarns signaler utbreder sig bortom horisonten som en markvåg närmast havsytan, vars ledningsförmåga påverkas av salthalten. Det finns därmed möjlighet att upptäcka fartyg som inte använder sin AIS (Automatic Identification System) även på långa avstånd. Syfte Det fanns tre olika huvudsyften med projektet: Validera havsströmmar ifrån satellitdata mot havsströmmar ifrån HF-radar Undersöka möjligheten att assimilera mätta havsströmmar i en havsmodell Undersöka möjligheterna att detektera fartyg med satellitdata och HF-radar Genomförande och resultat Radarsystemen kom på plats under oktober 2014. För att få strömriktning måste minst två radarsystem användas, och det är i det gemensamma täckningsområdet en 2-dimensionell strömhastighet kan beräknas. Ett ena systemet placerades på Måseskär, det andra på Väderöarana. Frekvensen som användes inledningsvis var 9.33MHz, och det visade sig ganska snart att det fanns kraftiga periodiska störningar inom bandet med en variation över dygnet. Då det var första gången denna frekvens provades i Europa med det aktuella systemet, SeaSonde från CODAR Ocean Sensors, saknades erfarenhet av hur man skulle åtgärda detta problem. Olika försök att minska påverkan från störningarna gjordes, men gav inte riktigt den önskade effekten. I början av februari 2015 byttes sedan frekvensen till 13.50MHz, vilket gav ett mycket bättre resultat. Räckvidden minskade något, men upplösningen kunde ökas tack vare större bandbredd och betydligt mindre störningar. Data från HFradarn har under hela projektet kunnat ses på: http://smhi.portus-codar.qrms.net/portus/. Ett exempel på en situationsbild ges i Figur 1. 1 Figur 1. Strömfält kl. 12:00 UTC, 1/7-2015. En radarantennsymbol markerar Väderöarna (nord) och Måseskär (syd). Validering av satellitdata: Under projekttiden har en stor mängd satellitdata laddats ned ifrån det område som HF-radarn täcker. De satellitdata som använts för uppskattning av havsströmmar är infraröda bilder ifrån instrumentet AVHRR (Advanced Very High Resolution Radiometer) som finns på flera amerikanska och europeiska vädersatelliter. Dessa bilder tas flera gånger varje dag och genom att beräkna hur temperaturmönster på havsytan rört sig mellan två bilder kan man uppskatta ytströmmarnas styrka och riktning. Ett exempel på detta visas i Figur 2. Metoden som används för att beräkna rörelserna kallas MCC (Maximum Cross Correlation) och bäst resultat fås när tiden mellan bilderna är runt fem timmar. För att kunna göra beräkningarna krävs molnfria bilder vilket gjort att endast 10 % av alla tillgängliga bilder kunnat användas. De uppskattade ytströmmarna har jämförts med mätningarna ifrån HF-radarsystemet och i de flesta fall visar de två metoderna samma havsströmsmönster. Satellitresultaten har även jämförts med ett antal numeriska modeller och med ett par lågupplösta havsströmsprodukter (AVISO och OSCAR) baserade på satellitdata ifrån radaraltimetrar. Dessa jämförelser visar på betydande skillnader mellan de olika numeriska modellerna och försvåras även av stora skillnader i rumslig upplösning. Assimilering av HF-radardata: Det var inte helt klart att nuvarande havsmodell skulle klara av att assimilera data från radarn. Detta visade sig dock gå bra, och de tester som gjorts visar på bättre modellresultat när man assimilerar in strömdata jämfört med om man inte gör det. Flera olika assimileringar gjordes, och i dessa påverkades olika variabler: havsytans höjd, assimileringsfrekvens samt beaktande av inverkan i 2D eller 3D. Drifters (bojar som driver i ytan) användes som en oberoende datakälla för ytström. Fartygsdetektion: Det använda systemet SeaSonde har en antennlösning som är kompakt och fungerar väl för oceanografiska mätningar vilket var det primära för validering av satellitdata. Det ansågs redan från början mindre lämpat för fartygsdetektion, och om möjligt hade en annan, otympligare, antennlösning med högre riktverkan varit att föredra. Egna algoritmer för fartygsdetektion har inte använts då arbetsinsatsen för att få tillräckligt detaljerad kännedom om radarsystemets funktionssätt och egenskaper bedömdes bli för omfattande. Detektionsresultat har istället tillhandahållits av CODAR via en speciell mjukvara man utvecklat för detta ändamål, men som 2 i dagsläget inte kan användas i realtid. Den begränsade datamängden som har undersökts gäller registreringar från ett dygn då HF-radarn arbetade på det mindre störda bandet 13.50MHz. Val av dygn styrdes av närvaron av ett eget fartyg inom täckningsområdet. Positionsdata från detta fartyg har kompletterats med registrerad AIS-information inom området under samma tidsintervall. Inga detektioner från radarsystemet har på ett robust sätt kunnat korreleras mot de fartygsspår som förekom i området enligt de kompletterande datakällorna. Figur 2. Exempel på två infraröda satellitbilder (bild till vänster och i mitten) som tagits med fyra timmars mellanrum och de ytströmmar (bild till höger) som beräknats utifrån dessa bilder. Diskussion och slutsatser Projektet har givit erfarenheter gällande möjligheter och begränsningar med HF-radarn. Det har tidigare inte funnits denna typ av radar i Sverige, och den utrustning som använts under projektet har varit hyrd. Erfarenheterna kommer vara viktiga vid eventuell framtida upphandling av HFradarsystem. Under projektet har två olika radarfrekvenser utvärderats. De olika frekvenserna gav olika lång räckvidd (lägre frekvens når längre) och möjlighet till olika upplösning av strömfältet (maximalt tillåten bandbredd hos den utsända signalen). Försöken från Skagerrak med HF-radar visar på att möjligheten att mäta ytströmmar är god. Det finns ofta dygnsvariationer av täckningsområdets storlek, och dessa beror troligtvis på atmosfäriska störningar på kortvågsbandet. Möjligheten att detektera fartyg med radarsystemet är inte lika utvecklat, utan havsström får ses som det primära användningsområdet. Detektion av fartyg med hjälp av satellit blev aldrig utvärderad, främst på grund av att radarsystemet kom på plats mycket senare än beräknat. Då var inte de satelliter som ursprungligen var tänkta att användas tillgängliga. Då HFradarns möjlighet för fartygsdetektion var mycket begränsad, skulle den heller inte kunnat användas för verifiering, utan satellitdata hade behövt verifieras mot AIS-data oberoende av HF-radardata. Förbättringar som kan göras i hårdvaran för fartygsdetektion gäller främst antennsystemets utformning. Det kan nämnas att utveckling av fartygsdetektion är pågående, och CODAR har nyligen annonserat förbättrade algoritmer där data från Skagerrak använts under utvecklingsarbetet. Detektionsresultat från aktuellt dygn genererade med den uppgraderade programversionen har inte kunnat utvärderas inom projekttiden. Den begränsade tidsperioden som radarn använts innebär också att vissa av de satelliter som man tänkt använda ej varit tillgängliga. Möjligheten att använda dessa satelliter för forskningssyften är ofta begränsad, och den period då de är tillgängliga kan vara kort. Ett permanent HF-radarsystem skulle ge möjlighet att testa även dessa, eftersom man då hela tiden har data från radarn tillgänglig. För fartygsdetektion är det användna systemet mindre lämpligt då dess egenskaper inte uppfyller kravbilden. Andra HF-radarsystem kan dock visa sig mer användbara för denna tillämpning. Problematiken kring sändningstillstånd på lämpliga frekvenser och störningar från andra sändare, 3 ibland på andra sidan jorden, är andra faktorer som kan begränsa såväl införande som användning av tekniken. Den assimilering som gjordes skulle också kunnat göras med satellitdata. Utifrån havsmodellens perspektiv hade det fungerat på motsvarande sätt som med data från HF-radarn. Detta ger möjlighet att använda satellitdata för områden där radarn ej är lämplig, t ex. Östersjön. Kontaktpersoner: SMHI: Johan Kronsell, [email protected] Chalmers: Leif Eriksson, [email protected] FOI: Anders Gustavsson, [email protected] 4