Pneumatiska artificiella muskler
advertisement

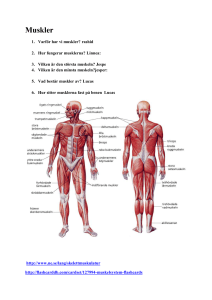
Rapport för Högskoleingenjörsexamen IDE 1276, December 2012 Mekatronik Pneumatiska artificiella muskler Sektionen för informationsvetenskap, data- och elektroteknik Högskoleingenjörsexamen med hjälp av en robotarm Albert Hoxha & Zejnulla Ibraimi I Pneumatiska artificiella muskler med hjälp av en robotarm Högskoleingenjörsuppsats 2012 December Författare: Albert Hoxha, Zejnulla Ibraimi Handledare: Tommy Salomonsson Examinator: Kenneth Nilsson II © Copyright Albert Hoxha, Zejnulla Ibriami, 2012. All rights reserved Högskoleingenjörsuppsats Rapport, IDE1276 Sektionen för informationsvetenskap, data- och elektroteknik Högskolan i Halmstad III Abstract According to the study [1] several firefighters are killed in action each year. This happens naturally in various ways. One of the major factors is that firefighters often do not know how the environment looks like, for example that a building in an industrial area contains hazardous gas cylinders. Without a solution, fire-fighters will continue to die in duty. It is therefore important to solve this problem so that we can minimize the risks and save lives. The goal of this project was a control system for pneumatic artificial muscles. To demonstrate that the desired functions of pneumatic artificial muscles worked properly, we created a simple arm with three degrees of freedom, with two muscles at each degree of freedom. The work consists mainly of pneumatic muscle, valves, programming and wireless communications. The focus was on controlling the robot arm using pneumatic artificial muscles. In order to achieve the arm to move to the desired position, we used wireless communication, the transmitter and receiver, and the pneumatic artificial muscles. This includes also programming, which was created on the programming language Spin. IV V Sammanfattning Enligt en undersökning[1] omkommer ett flertal brandmän varje år av olika anledningar. En orsak till dödsfallen är att brandmän oftast inte vet hur omgivningen ser ut t.ex. att en byggnad i ett industriområde innehåller farliga gastuber. För att minimera riskerna vore det önskvärt att brandmän fick tillgång till utrustning som bidrar till att skapa en tydlig bild av insidan i en industrilokal. Detta hjälper dem med att kartlägga området innan de beger sig in i farliga miljöer. Denna utrustning kan vara en robot. Målet med detta projekt var ett reglersystem för pneumatiska muskler. För att visa att de önskade funktionerna för pneumatiska muskler fungerade korrekt skapades en enkel robotarm med tre frihetsgrader, där två muskler vid varje frihetsgrad användes. Arbetet består främst av pneumatiska muskler, proportionalventiler, programmering och trådlös kommunikation. Fokus låg på att styra robotarmen med hjälp av pneumatiska muskler. För att få armen att röra sig till det önskvärda positionen användes trådlös kommunikation, sändare och mottagare, samt pneumatiska artificiella muskler. Till detta hör även programmering till, vilket skapades under programmeringsspråket Spin. VI VII Förord Denna rapport är en högskoleingenjörsuppsats och är resultatet av ett examensarbete på 15 hp, som är en del i utbildningen för mekatronikingenjörsprogrammet 180 hp, vid sektionen för informationsvetenskap, Data- och Elektroteknik (IDE) på Högskolan i Halmstad. Examensarbetet är utfört under våren 2011 i samarbete med Leif Ahlman och Drones Networking. Albert Hoxha, Zejnulla Ibraimi VIII IX Innehåll ABSTRACT ...........................................................................................IV SAMMANFATTNING .............................................................................VI FÖRORD .............................................................................................VIII 1 INTRODUKTION ................................................................................ 1 1.1 BAKGRUND ........................................................................................................... 1 1.2 SYFTE .................................................................................................................. 2 1.3 KRAVSPECIFIKATION.............................................................................................. 2 1.3.1 1.3.2 1.4 KONSTRUKTIONS KRAV ................................................................................................................ 2 FUNKTIONELLA KRAV ................................................................................................................... 2 AVGRÄNSNINGAR .................................................................................................. 2 2 BAKGRUND ....................................................................................... 3 2.1 2.2 2.3 2.4 PNEUMATISKA MUSKLER ........................................................................................ 3 PROPORTIONALVENTIL ........................................................................................... 7 TRÅDLÖS KOMMUNIKATION .................................................................................... 7 CAMPER TROLLEY ................................................................................................. 7 3 METOD............................................................................................... 9 3.1 PNEUMATISKA MUSKLER ........................................................................................ 9 3.2 UTVECKLINGSMILJÖ............................................................................................. 11 3.3 INFORMATIONSÖVERFÖRING ................................................................................. 11 3.3.1 3.3.2 PWM TILL UTVECKLINGSKORTET ............................................................................................... 11 PWM FRÅN UTVECKLINGSKORTET.............................................................................................. 11 3.4 STYRSYSTEM ...................................................................................................... 12 3.5 FUNKTIONEN MELLAN PROCESSORER .................................................................... 13 3.6 FÖRUTSÄTTNINGAR INFÖR VAL AV UTVECKLINGSKORT ........................................... 14 3.7 UTVECKLINGSKORT ............................................................................................. 15 3.7.1 PROPELLER DEMO BOARD......................................................................................................... 15 3.7.2 PROPELLER PROTO BOARD ....................................................................................................... 16 3.8 KOMPRESSOR ..................................................................................................... 16 3.9 STRÖMFÖRBRUKNING .......................................................................................... 16 4 RESULTAT....................................................................................... 17 4.1 4.2 4.3 4.4 PNEUMATISKA LUFT MUSKLER .............................................................................. 17 UTVECKLING AV MJUKVARA.................................................................................. 21 TEST AV PROPORTIONALVENTIL ............................................................................ 21 TEST AV TRÅDLÖS KOMMUNIKATION ...................................................................... 22 X 4.5 4.6 4.7 4.8 4.9 TEST AV FÖRSTÄRKARE ....................................................................................... 22 DIMENSIONERING AV LP-FILTER ........................................................................... 23 TEST AV FÖRSTÄRKARE MED LP-FILTER................................................................ 23 TEST AV ANALOG TILL DIGITAL(A/D) KONVERTERING .............................................. 24 ROBOTARMENS UTFORMNING ............................................................................... 25 5 DISKUSSION ................................................................................... 27 5.1 5.2 5.3 5.4 5.5 PNEUMATISKA MUSKLER ...................................................................................... 27 PROPORTIONALVENTIL ......................................................................................... 27 TRÅDLÖS KOMMUNIKATION .................................................................................. 27 DC/DC ............................................................................................................... 28 OPERATIONS FÖRSTÄRKARE OCH LP-FILTER ......................................................... 28 6 REFERENSER ................................................................................. 29 7 KOSTNADSKALKYL ....................................................................... 31 8 BILAGOR ......................................................................................... 33 XI Pneumatiska artificiella muskler 1 Introduktion 1.1 Bakgrund Drones Networking[2] är ett företag beläget i Kungsbacka. Företaget säljer och utvecklar autonoma och fjärrstyrda robotar för den civila och militära marknaden. Ägaren Leif Ahlman har länge haft en vision om att kunna ersätta och skydda människan från att bege sig in i farliga utrymmen, där dolda risker kan finnas, som gör att någon kan komma till skada och i värsta fall mista sitt liv. De som, enligt Leif, ska ersätta människan och utföra jobbet är robotar. I dagsläget finns redan liknande produkter[3] ute på marknaden. Nackdelen med de existerande robotarna är priset, som är högt. Kommunen har därför inte råd att sätta in en robot vid varje brand. Robotarna kostar ett par miljoner och den höga kostnaden uppstår genom att de byggs från grunden. En ide som Drones Networking har är att använda sig av produkter som redan finns ute på marknaden. Idag finns det bra kameror till ett bra pris, enligt Drones Networking, en bärare(Camper trolley)[4] som passar bra till en robotarm och ger en god rörelseförmåga. Aktuatorer som valdes till projektet var PAMs(Pneumatiska Artificiella Muskler). Varför just dessa produkter valdes är för att Camper trolley är väldigt stark och har 360 graders rörlighet på en plan yta[5]. PAM kan operera i olika vinklar, det vill säga att det är möjligt att komma runt kanter[6] samtidigt är de robusta och billiga[7]. 1 Pneumatiska artificiella muskler 1.2 Syfte Syftet med detta examensarbete är att finna en lösning för att reglera pneumatiska muskler, även kända som Pneumatic Artificial Muscles (PAMs). Robot armen ska också styras trådlöst. 1.3 Kravspecifikation Projektets kravspecifikationen har delats upp i två olika kategorier. 1.3.1 Konstruktions krav Camper Trolleys manövrering får inte modifieras. 1.3.2 Funktionella krav Kunna styra en muskel, dvs skapa rörelser till roboten. För styrningen av muskler används mikrokontroller Propeller från Parallax Inc. Vid rörelse av armen skall den inte ha funktionen ON/OFF, dvs full kraft och ingen kraft. 1.4 Avgränsningar Fokus ligger på att musklerna ska styras och inte på att skapa en robotarm. Robotarmen ska fungera som en bekräftelse till att det går att kontrollera musklerna. Examensarbetet går endast ut på att ta fram en fungerande prototyp. Det ingår ingen marknadsföring i examensarbetet. 2 Pneumatiska artificiella muskler 2 Bakgrund 2.1 Pneumatiska muskler Pneumatiska artificiella muskler(PAM), började användas under 50-talet för medicinskt syfte[8]. En stor faktor som bidrog till att pneumatiska muskler började användas mer, var att de är lätta. En annan bra egenskap som musklerna har är att de styrs med hjälp av luft. PAMs kärna består av en gummislang som är insvept i ett hårt plastnät, se figur 2-2. Pneumatisk muskel är en enkel enhet som är till för att skapa dragkraft. När muskeln är i ett avslappnat läge innehåller den inte någon luft. Då muskeln förses med luft i det avslappnade läget, drar den ihop sig. Kraften hos en pneumatisk muskel fås då den drar ihop sig till ett indraget läge. [9] I figur 2-1 nedan är punkt 1 en rörlig del(frihetsgrad) medan punkt 2 är en fix del. Muskeln drar ihop sig med endast ena änden, punkt 1. Vid sammandragning, se figur 2-1, börjar armen röra sig uppåt och vid avslappnat läge nedåt. Figur 2-1 Positionering med hjälp av PAM. Figur 2-2 Silikonet omsluts av ett slitstartkt nät. 3 Pneumatiska artificiella muskler För att ta reda på pneumatiska muskelns beteende, utförde Frank Daerden och Dirk Lefeber två olika tester[9]. Test 1: genomfördes genom att ena änden på muskeln var fixerad och den andra änden var belastad med belastning , se figur 2-3. I figur 2-3 är muskeln till vänster i avslappnat läge. Om inte luft tillfördes till resulterade det till en minimal sammandragning och muskelns längd är . Om luft tillfördes i muskeln med ett tryck , bidrog det till dragningskraft. Belastning kommer dras tills jämvikt uppstår. Med jämvikt menas att de förändrande processer som finns (krafter) förhåller sig till varandra på ett sådant sätt att systemet förblir oförändrat med tiden. Längden på muskeln drar ihop sig till längden . Efter testets utförande framkommer 2 regler. 1. Om PAMs volym ökar bidrar det till minskad längd och ökad kraft, se figur 2-5. 2. Ökas trycket, dras PAMs ihop sig mot en konstant belastning M. Figur 2-3 Muskelns karakteristik med konstant belastning M och varierande tryck. Test 2: genomfördes för att komma fram till andra regler. I figur 2-4 finns två belastningar M. Testet utfördes på näst intill samma sätt, förutom att tillförseln av luft hade ett konstant tryck , medan belastning minskade i efterhand. När belastnig helt försvann, fick muskeln sin maximala volym och dess längd var minimal , se figur 2-4, då den är helt sammandragen. Efter testets utförande framkommer ytterligare två regler, regel 3 och 4. 3. PAM längd minskar vid ett konstant tryck om belastning minskar. 4. Muskeln har en maximal sammandragning. Vid maximal sammandragning har den ingen dragkraft. Figur 2-4 Karakteristik med minskad belastning och konstant tryck. 4 Pneumatiska artificiella muskler Karakteristiken av ett statiskt förhållande fås fram genom att faställa trycknivån, yttre belastning och volym med avseende till längdskillnader på PAM. Anta att tryck tillförs en PAM under ett tidsintervall. När ett tryck tillförs kommer muskelns volym att öka och bidra till , under samma tid dt kommer muskelns längd dL att förändras. Förändringen bidrar till en last blir förflyttad under samma längd, det kräver ett arbete . Fås en formel enligt nedan: ekvation (1)[9] Slutligen fås formeln efter förenkling: ekvation (2)[9] Figur 2-5 visar en längdförändring i förhållande till maximal värde . En minskning på 10 procent anger en förkortning till 9/10 av den maximala längden. Alla kurvor är likadana och trycket är en skalfaktor som kan dras från regel 1, ökad tryck medför ökad kraft och samtidigt minskar muskelns längd. Oavsett den muskel typ som övervägs kommer kraften alltid från sitt högsta värde vid full muskel längd, till noll vid full sammandragning. Figur 2-5 Test resultat av Frank och Dirk. 5 Pneumatiska artificiella muskler En muskel visar ett elastiskt beteende på grund av luftens kompressibilitet. Även om trycket hålls på en fast nivå, kommer muskeln att agera som ett elastiskt band, då den alltid tillför sitt jämviktsläge på grund av ändrad kraft med avseende till längden. Resultatet i de båda testerna resulterar till en femte regel 5. För varje par av muskler och vid ett visst tryck hamnar de i ett jämviktsläge. Vid användning av två muskler är den genererande kraft som varje muskel får, proportionell mot det verkande trycket. Jämvikt läge fås genom att bestämma förhållandet mellan musklernas tryckskillnad[9]. I figur 2-6 arbetar musklerna mot varandra, då muskel 2 får in en viss mängd luft släpps samma mängd ut från muskel 1. Detta medför ett jämviktsläge mellan musklerna. Figur 2-6 Jämviktsläge råder vid olika tryck. 6 Pneumatiska artificiella muskler 2.2 Proportionalventil Proportionalventilen är en ventil som reglerar tryck proportionellt mot en elektrisk signal (analog eller digital). Proportionalventilen används till att styra lufttillförseln till musklerna. Den integrerade tryckgivaren och elektroniken övervakar kontinuerligt att är- och börvärde stämmer överens och kompenserar för eventuella förändringar. Den inbyggda förstärkningen gör att det blir en hög stabilitet i systemet.[10] 2.3 Trådlös kommunikation Trådlös kommunikation är en teknik, 2.4GHz frekvens, där en sändare skickar information via radio signal. Sedan upptas denna signal med hjälp av en mottagare. Det är mottagaren som omvandlar informationen till pulser. Kontrollen som användes för att styra musklerna är egentligen till för att styra radio styrda flygplan. Då kontrollen sänder data behövs en mottagare som ska läsa av dessa. 2.4 Camper Trolley Camper Trolley[4] användas som bas för armen, då den möjliggör att armen styrs till en önskad plats. Camper Trolley är avsedd för att flytta på husvagnar med en total last på 1500 kg. Trolleyn fästs på vagnens framfäste och förflyttas sedan till önskad plats. Den drivs med hjälp av en enkel fjärrkontroll med fyra stycken knappar; upp-, ned-, höger- och vänsterknapp. 7 Pneumatiska artificiella muskler 8 Pneumatiska artificiella muskler 3 Metod 3.1 Pneumatiska muskler I valet av teknik för hur armen ska styras föreslog företaget, Drones Networking, pneumatiska muskler. Musklerna valdes på grund av deras egenskaper[3]: Låg vikt. Flexibilitet. God reaktion. Enkel installation. Förmånligt pris. Då två motkopplade muskler används som varandras motsatser, den ena dras ut då den andra dras in. I en frihetsgrad som kan röra sig upp och ned är det lämpligt att ha pneumatiska muskler grupperande i par, en på vardera sida, se figur 3-1. Figur 3-1 Par av muskler. Luft är grunden till styrning av pneumatiska muskler. För att kunna utföra maximal dragkraft, måste muskeln vara i ett helt utdraget läge. Det finns två fästpunkter på musklerna, den ena delen fästes på en fix del, punkt 3, och den andra mot en rörlig del enligt punkt 1 eller punkt 2, se figur 3-1. För att utvinna största möjliga rörligheten på armen med minsta sammandragning på muskeln är punkterna 1,2 och 4 det bästa alternativet, se figur 3-2. Det innebär att kombinationen 1, 3 och 4, enligt figur 3-2, inte är relevant för projektet. 9 Pneumatiska artificiella muskler Figur 3-2 Två olika fästpunkter för muskler. 10 Pneumatiska artificiella muskler 3.2 Utvecklingsmiljö Mjukvaran till robotarmen är skriven i Propeller tools. Språket som använts är av namnet Spin.[11] 3.3 Informationsöverföring 3.3.1 PWM till utvecklingskortet Pulsbreddsmodulering[12], även kallad för PWM, är en metod för överföring av information. Den information som överförs är kodad med hjälp av bredden på dessa pulser. Pulsbreddsmodulering är alltså en modulerings teknik, se figur 3-3, för att med variabelt breda pulser representera amplituden av en analog signal. En periodtid T, gäller från att en puls blir hög tills den blir hög igen. Periodtiden är alltid densamma vare sig pulsbredden varierar eller inte. Pulsbredden som kommer att användas i detta projekt varierar mellan 1 - 2 ms, se figur 8-1 till 8-3 under bilagor. Figure 3-3 Pulsbredden är 1 ms. Trådlösa kommunikationens sändare skickar data med hjälp av pulser vars längd symboliserar vilken position varje spak har. De processorer som används för att läsa dessa pulser ligger i en oändlig loop och använder timers för att beräkna pulsernas längd, vilket sedan läggs på det gemensamma minnet. 3.3.2 PWM från utvecklingskortet På robot armen finns det tre frihetsgrader. Varje frihetsgrad har två muskler. Trycket till musklerna regleras med en proportionalventil per muskel. Ventilerna styrs av en analog spänning som skapas med PWM och ett lågpassfilter, PWM signalen skickas från utvcklingskortet. Utvecklingskortet skapar dessa pulser och hämtar information om lägena på trådlösa kommunikationens joystick, som finns i det gemensamma minnet. De använder sedan informationen för att bestämma om vilken frihetsgrad som ska regleras, som var och en har kontroll över. Om armen ska röra på sig kommer två värden som anger pulslängder att förändras, den ena kommer minska och den andra öka, beroende på vilket håll frihetsgraden ska vrida sig. Dessa två värden används sedan för att skapa pulser med angivna längder, men med konstant frekvens, vilket med lågpassfiltret kommer att styra ventilerna. 11 Pneumatiska artificiella muskler 3.4 Styrsystem I figur 3-4 ses en enkel presentation av hur styrsystemet är uppbyggd. Genom fjärrkontrollen styrs de tre frihetsgrader som finns på robotarmen, se enligt figur 3-4. I figuren ses även vilken joystick, från fjärrkontrollen, som styr de olika frihetsgrader. Fjärrkontrollen skickar signaler till utvecklingskortet(mottagaren), se figur 3-4. Utvecklingskortet skickar i sin tur den beräknade signalen vidare till movern(proportionalventiler). Med hjälp av signalen fås ett läge på armen. Då signalen i movern redan är beräknad så vet den även vilken muskel som ska påverkas på robotarmen, i figur 3-4 till höger. Figur 3-4 Styrsystem för robotarmen. 12 Pneumatiska artificiella muskler 3.5 Funktionen mellan processorer Varje processor(även kallad för cog) har ett eget minne(CM), se figur 3-5, där endast coggen har förfogande till. I systemet finns även det gemensamma minnet, RAM(Random Access Memory), där alla coggar har möjlighet att nyttja. Varje frihetsgrad regleras av två coggar(R och M), en(R) för läsning av data som skickas från den trådlösa kommunikationen och en(M) som hämtar upp datan för att påverka den specifika frihetsgraden. I RAM hamnar data för den muskel som användaren vill påverka. Det är till exempel R1 som får in data från den trådlösa kontrollen, datan skickas vidare till det gemensamma RAMminnet där datan kan hämtas upp från den tillhörande coggen, i detta fall M1. Proportionalventilen utgör sedan ett läge på armen med hjälp av denna information. Figur 3-5 Hur Coggar kommunicerar med varandra med hjälp av RAM. 13 Pneumatiska artificiella muskler 3.6 Förutsättningar inför val av utvecklingskort Då Drones Networking hade egna önskemål om att själva kunna arbeta med och förstå utvecklingskortet samt mjukvaran, föreslog de det kort som kunde användas. Dock gick det inte att uppfylla alla krav, detta utifrån de tester som utfördes. En lista med krav och önskemål på det utvecklingskort som skulle användas skapades. De krav som ställdes är följande: Att kortet ska ha alla 32 portar fria. Det första kortet, som Drones Networking föreslog, hade endast 8 portar fria och det räckte inte. Att kortet inte ska vara för stort. Allt ska fästas på trolleyn och platsen där är begränsad. Att kortet har flera processorer. Då flera funktioner löper parallellt är det enklare att skriva koden med flera processorer. Då kan varje processor ha sin egen funktion. Att kortet har lysdioder. Dessa behövs för att testa mjukvaran, då inte alla ventiler har kopplats ihop och inte heller armen monterats etc. Någon typ av reset knapp för att rensa minnet snabbt. Enkel USB koppling. 14 Pneumatiska artificiella muskler 3.7 Utvecklingskort 3.7.1 Propeller Demo Board Propeller Demo Board[13] av typen P8X32A-Q44 är det kort som föreslogs av företaget, se figur 3-6. Fördelar 8 processorer oberoende av varandra. EEPROM för program lagring. 8 st. LED. Reset knapp. USB-anslutning. Ingen lödning för åtkomst av portar. Nackdelar 8 st. lediga portar. Sammanfattning: kortet med sina 8 processorer är väldigt kraftfullt, men mycket begränsat för detta projekt. Figur 3-6 Propeller Demo Board. 15 Pneumatiska artificiella muskler 3.7.2 Propeller Proto Board Propeller Proto Board[14] av samma typ som ovan, alltså, P8X32A-Q44, se figur 3-7. Fördel: 8 processorer oberoende av varandra. 32 lediga portar. EEPROM för lagring av program. Reset knapp. USB-anslutning. Nackdel: Ömtålig USB-anslutning. Anslutningarna måste lödas. Sammanfattning: Kortet är perfekt för projektet, då den har 32 portar lediga. Även denna har 8 processorer vilket gör det möjligt att skriva koden ännu enklare. Figur 3-7 Propeller Proto Board 3.8 Kompressor Pneumatik styrs med hjälp av lufttryck, därför används en kompressor. Kompressorn ska fästas ihop med trolleyn och måste därför vara relativt liten. Robotarmen kommer att styras med sex pneumatiska muskler och kompressorn ska kunna förse alla sex muskler med luft. Musklerna ska förses med maximalt fem Bars tryck. 3.9 Strömförbrukning I projektet används ett spänningsaggregat som matning, då det förelåg platsbrist och för hög kostnad med batterier. Syftet med examensarbetet är att ta fram en demoprodukt som inte ska vara helt optimerad. Tanken är att produkten i framtiden helt ska drivas med hjälp av batterier. 16 Pneumatiska artificiella muskler 4 Resultat 4.1 Pneumatiska luft muskler För att veta vilken kraft musklerna klarade av gjordes tester. En våg(dynamometer) mätt i newton, se figur 4-1, fästes på en monteringsvägg tillsammans med musklerna. Med hjälp av dynamometern uppskattas en kapacitet för varje muskel vad gäller kraft. Under testet användes inte proportionalventiler, se figur 4-1, istället användes en tryckregulator som befinner sig i figuren till vänster. Muskelns längd förkortades när kraften hos dynamometer reducedrades vid ett konstant tryck. Testet gav en inblick i hur en luftmuskel fungerar vid ett visst tryck. Vid en undersökning av fem muskler där olika tryck användes, framkom att de har likartad karakteristik. Genom att sammanfatta alla värden med hjälp av MatLab, skapades en 3D graf, se figur 4-2. Figure 4-1 Test av luftmuskel vid ett visst tryck. Figur 4-2 Karakteristiken för 5 stycken muskler vid samma storlek. 17 Pneumatiska artificiella muskler Första testet genomfördes genom att dra ut muskeln till sin maximala längd, se figur 4-3, för att sedan påföra luft tills muskeln drar ihop sig till sin minimala längd, se figur 4-4. Från regel ett som Frank och Dirk kommit fram till, om PAMs volym ökar så bidrar det till en minskad längd, stämmer överens med det utförda testet. Samtidigt kan regel fyra ur avsnit 2.1 bekräftas, muskeln har en maximal sammandragning. Vid maximal sammandragning har den ingen dragkraft, se figur 4-4. Figur 4-3 Muskel i ett utdraget läge. Figur 4-4 Muskel i sitt indragna läge(max). Andra testet, med varierande tryck(1-4bar) och konstant massa 6Kg, utfördes genom att fixera ena änden av muskeln samt en hängande massa i den andra änden. I sin maximala längd har muskeln inget tryck(noll bar). Vid en konstant massa och varierande tryck drar muskeln ihop sig tills det att den når sin minimala längd, se figur 4-5. Figur 4-5 Konstant last med varierande tryck. 18 Pneumatiska artificiella muskler Tredje testet, med konstant tryck(4bar) och varierande massa, utfördes genom att fixera ena änden av muskeln medan den andra belastades. Då massan minskade, drog muskeln ihop sig till sin minimala längd, se figur 4-6. Figur 4-6 Konstant tryck med varierande last. 19 Pneumatiska artificiella muskler Vid test fyra användes två muskler, med varierande tryck, som motarbetar varandra, se figur 2-6. En muskel börjar med noll bar tryck(maximal längd, från höger i figur 4-7 med noll procent i tryck) och den andra muskeln börjar med 4bar(minimal längd, från vänster i figur 47 med 100 procent tryck). Då trycket successivt minskades respektive ökades, skapades en jämn rörelse mellan musklerna. Då trycket inte förändrades hamnade musklerna i jämviktsläge. Eftersom musklerna har varierande tryck är de alltid inversen av varandra , dvs då en muskel innehar maximal tryck har den andra muskeln noll i tryck. Detta innebär då en muskel utvidgas med en centimeter, dras den andra muskeln ihop sig en centimeter. För bättre förståelse finns figurerna 8-4 till 8-6 under bilagor, dessa bilder togs under tester som utfördes till syfte av detta projekt. Varför två stycken muskler användes är för att skapa en jämn och stabil rörelse. Eftersom trycket ökade respektive minskade successivt, skapades en mjuk och jämn rörelse. Detta är bra för att skapa good precision vid rörelse. Figure 4-7 Karakteristiken av två muskler som motarbetar varandra vid olika tryck. Med hjälp av Daerden och Lefebers undersökning kunde dessa tester bekräftas. Slutsatsen är att pneumatiska muskler (PAMs) kännetecknas av 5 regler som beskriver hur musklerna fungerar. De 5 reglerna består av: Om PAMs volym ökar bidrar det till minskad längd. Ökas det pneumatiska trycket dras PAMs ihop sig mot en konstant belastning. PAMs längd minskar vid ett konstant tryck om belastning minskar. Muskeln har en maximal sammandragning. Vid maximal sammandragning har den ingen dragkraft. För varje par av muskler och vid ett visst tryck hamnar de i jämnviktsläge. 20 Pneumatiska artificiella muskler 4.2 Utveckling av mjukvara Processorn som används, över vilka arbetsuppgifterna fördelas, är 8-kärnig. Tre av kärnorna läser kontinuerligt av tre axlar(joystick) på fjärrkontrollen. Dessa tre värden läggs på det delade minnet, där andra kärnor kan nå dem. Tre andra kärnor hämtar sedan dessa värden från det delade minnet och använder dem för att styra frihetsgraderna på armen. Resterande två kärnor används huvudsakligen inte. 4.3 Test av proportionalventil Då testerna utfördes med proportionalventiler gav det en uppfattning om hur systemet egentligen fungerar. Ventilen fick in en viss spänning från ett spänningsaggregat. Vid en spänning fås ett tryck, se figur 4-8. Figure 4-8 Karakteristiken för en proportionalventil 21 Pneumatiska artificiella muskler 4.4 Test av trådlös kommunikation Mottagaren har 6 kanaler. Testet visade att varje kanal hade en periodtid på 65 Hz och att den låg på 0.15V. Delta T på varje kanal. Stillastående (utan att röra kontrollen) 1.520 ms, se figur 8-1. Max höger (kontrollen flyttas till max position höger) 1.920 ms, se figur 8-2. Max vänster (kontrollen flyttas till max position vänster) 1.100 ms, se figur 8-3. 4.5 Test av förstärkare Proportionalventilen har ett arbetsområde mellan 0-10V. Utvecklingskortet kunde endast skicka ut en analog signal 3.16V och för att kunna försörja proportionalventilen så behövde signalen förstärkas. För att uppfylla de kraven för proportionalventilen så användes en förstärkare, se figur 4-9. Figur 4-9 Dimensionering av förstärkare. Den formel som användes för att beräkna den förstärkning som krävdes för ventilen, enligt ekvation 3: ekvation (3) När den analoga signalen ligger på max 3.16V förstärks signalen till 9.852V. En förstärkning på 3.04 gånger, teoretiskt ligger den på 3.2 gånger förstärkning. 22 Pneumatiska artificiella muskler 4.6 Dimensionering av LP-filter För projektet valdes ett passivt LP-filter av första ordningen. LP-filtret användes för att omvandla pulsbreddsmodulerad signal till en analog signal. Filtret dimensionerades efter en pulsbreddsmodulerad signal som skickades från utvecklingskortet och hade en frekvens om 700Hz. Gränsfrekvensen (F) valdes till 72Hz. Formel för dimensionering enligt ekvation 4. Kondensatorn (C) valdes till 10 nF, det som återstod var att beräkna R enligt ekvation 5 som blev 220kΩ. Ur figur 4-10 fås 72.3Hz. ekvation (4) ekvation (5) Figur 4-10 Dimensionering av ett LP-filter. 4.7 Test av förstärkare med LP-filter Utförande: test med signal från utvecklingskort och LP-filter. Resistansen ligger på 220K och Kondensatorn ligger på 10nF. Den analoga signalen från LP-filtret ligger mellan 0.024-3.16V beroende på pulsbreddens längd då vi styr fjärrkontrollen, se figurerna 8-1 till 8-3 under bilagor. Den minsta längden på pulsbredden var 1ms som motsvarar 0.024V och den maximala motsvarar 3.16V. Signalen från LP-filter skickades in på ben 3 på AD8032. AD8032 var kopplad som testet innan. Resultat: den analoga signalen som låg på 3.16 från LP-filtret Förstärktes till 9.73V. Minimum ligger på 0.024V. En förstärkning på 3.073 ggr. 23 Pneumatiska artificiella muskler 4.8 Test av analog till digital(A/D) konvertering Utförande: portarna från Adc kopplades enligt figur 4.11. Beräkning: enligt ekvation 6 och max 8 bitars(255byte) Adc. Resultat: Adc referens spänning ligger på 5 volt vilket medför att varje byte är 0.0196 volt, enligt ekvation 6. I ekvationen nedan är den spänning som Adc matas med och byte är upp till 255. ekvation (6) Figur 4-11 Koppling av ADC. 24 Pneumatiska artificiella muskler 4.9 Robotarmens utformning För att se hur musklerna fungerar i praktiken fästes de på respektive plats. Den mest krävande delen för musklerna ligger mellan muskel 1 och 2, se figur 4-12. Frihetsgraden där muskel 1 och 2 är krävdes större muskler än resterande frihetsgrader, eftersom musklerna måste prestera mer än övriga. Denna frihetsgrad påverkas mest då hela tyngden på armen vilar på den. När önskad position valdes så motarbetades musklerna för att hålla respektive frihetsgrad i ett jämviktsläge. I figuren nedan så är muskel 1, 2 och 4 av samma storlek, 21 cm i utsträckt läge, medan muskel 3, 5 och 6 är mindre, 15 cm i utsträckt läge. Muskel 3 är mindre än muskel 4 på grund av gravitationen utgjorde nästan hela arbetet tillbaka. I kamera ledet används också mindre muskler då det inte krävs lika stor kraft som för muskel 1, 2 och 4. Figur 4-12 Robotarmen med penumatiska muskler. 25 Pneumatiska artificiella muskler 26 Pneumatiska artificiella muskler 5 Diskussion 5.1 Pneumatiska muskler De muskler som vi i början hade var 6 mm i diameter och 15 cm i utsträckt läge. Totalt kunde de utföra en kraft om 7 kg. Detta var givetvist inte tillräckligt för alla frihetsgrader. I detta skede utförde vi tester och valde rätt muskler till frihetsgraderna. Testen utfördes med hjälp av en dynamometer, som kopplades fast vid respektive frihetsgrad. Genom att dra i dynamometern tills frihetsgradens vinkel förändrades, utvisades den minsta kraft som behövdes. De utvalda musklerna var klart mycket starkare än de som vi först hade, då omkring 20 kg kraft kunde utföras. I utdraget läge är de 21 cm långa och det underlättar utförandet av arbetet, då musklerna är starkare och mer robusta. Under ut-expo blev flera muskler förstörda genom att de hade fått hål i gummislangen vilket ledde till att luft läckte ut ur slangen. Därför var musklerna inte av den bästa kvaliteten och kan inte jämföras med de som Daerden och Lefeber använde. Reparationsförsök gjordes men dessvärre kunde inte hålen täckas till 100 procent. Angående de PAMs som valdes, instämmer vi i att relativt hög precision i rörelse kan fås med lufttryck. Musklerna som användes i vårt projekt var mycket ömtåliga och alla sex kunde inte leverera som de skulle. De gick lätt sönder vid det maximala trycket. Den faktor som bidrog till att musklerna inte höll var att kärnan, som bestod av en gummislang, var helt utsliten och såg ut att vara gammal. Om musklerna hade varit av en bättre kvalitet hade de tester som gjordes för projektet fått ett bättre testresultat. 5.2 Proportionalventil Då en proportionalventil har bra precision rådde det inte några tvivel om att just dessa ventiler skulle användas i detta examensarbete. För de utvalda ventilerna var priset en avgörande faktor, de kostade ca 6500 kr per styck. Budgeten räckte inte till för denna kostnadsnivån. Sponsorer fick därför sökas och examensarbetet blev sponsrat med sex stycken ventiler. I gengäld ville företaget, Norgren, att en skylt skulle sättas upp med företagets logo under utexpo dagarna. De främsta faktorerna som bidrog till att dessa proportionalventiler valdes var att felmarginalen var mindre än 1 procent och samt att de hade en låg energiförbrukning. 5.3 Trådlös kommunikation Fjärrkontrollen som valdes av företaget är optimerad för modellflygning. Den har tillgång till sex kanaler och sänder signaler i form av radiovågor. Då projektet minst skulle ha tre frihetsgrader, är valet av kontrollen gynnande. Armen kommer i framtiden att användas i olika miljöer, där den oftast kommer att styras med hjälp av en monitor, därför är kontrollen bra med sin 2.4 Ghz signal. Mottagaren som samspelar med kontrollen är väldigt liten och lätt, den väger endast 9 gram. Att arbeta med mottagaren, koppla den samman med fjärrkontrollen samt att komma åt pinnarna, var okomplicerat. 27 Pneumatiska artificiella muskler 5.4 DC/DC Det framgick vid projektets start att systemet skulle matas med hjälp av batterier. I ett senare skede upptäcktes att proportionalventilerna skulle matas med 24 volt. Detta medförde att batteriet skulle vara minst 24 volt. Det behövdes därför DC/DC omvandlare för att resterande komponeneter kunde spänningsmatas. 5.5 Operations förstärkare och LP-filter Utvecklingskortet skickar ut pulsmodulerad signal från utgångsportarna. Det krävdes därför lågpass filtrering för att få ut en analog signal. Den analoga signalen från lågpass filtret låg mellan 0.024 till 3.16 volt. Proportionalventilerna krävde 0 till 10 volt. Den analoga signalen förstärktes med tillräcklig spänning för att proportionalventilerna skulle kunna styras inom deras arbetsområde. 28 Pneumatiska artificiella muskler 6 Referenser [1] http://www.brandfacket.se/upload/Dokument%2008/FireFighter0702.pdf [2] http://www.dronesnetworking.se/ [3] http://www.nyteknik.se/nyheter/fordon_motor/motor/article250765.ece [4] http://www.mover-technology.com/en/products/camper-trolley-ct1500/ [5] http://www.mover-technology.com/en/material/video/ [6] http://www.youtube.com/watch?v=MUMSfNw1cRc [7] http://www.shadowrobot.com/airmuscles/overview.shtml [8] http://www.cyberneticzoo.com/?p=6674 [9] http://lucy.vub.ac.be/publications/Daerden_Lefeber_EJMEE.pdf [10] http://www.norgren.com/ws/resources/VP50+datasheet+.pdf [11] http://www.parallax.com/tabid/832/Default.aspx#Manuals [12] http://www.robotsteel.com/cgi/i?pulsbreddsmodulering [13]http://www.parallax.com/Store/Microcontrollers/PropellerDevelopmentBoards/tabid/514/CategoryID/73/Lis t/0/SortField/0/catpageindex/2/Level/a/ProductID/340/Default.aspx [14]http://www.parallax.com/Store/Microcontrollers/PropellerDevelopmentBoards/tabid/514/CategoryID/73/Lis t/0/SortField/0/Level/a/ProductID/423/Default.aspx 29 Pneumatiska artificiella muskler 30 Pneumatiska artificiella muskler 7 kostnadskalkyl Produktbeskrivning Startbudget Pris Sponsring Proportionalventiler Budget - kostnad 12 500 kr Camper Trolley 1500 Mikroprocessor Parallax, Propeller 8 portar Mikroprocessor Parallax, Propeller 32 portar AD8032 förstärkare ADC DC/DC omvandlare Muskler små Muskler medium Företagets kostnader Kvarstående budget Antal 4 000 kr 700 kr 405 kr 82.65 kr 54.24 kr 60 kr 123 kr 481.34 kr 6 450 kr Slutsumma 1 1 1 4 000 kr 700 kr 405 kr 3 1 3 6 3 248 kr 54.24 180 kr 738 kr 1 444 kr 7 770 kr 4 730 kr 6 38 700 kr 41 740 kr Figur 7-1 Ekonomisk översikt. 31 Pneumatiska artificiella muskler 32 Pneumatiska artificiella muskler 8 Bilagor Figurerna 8.1 – 8.3 är tagna direkt under testning från oscilloskopet. De visar den pulsen som skapas då man flyttar på joystick från fjärrkontrollen, från höger till vänster respektive stillastående. Figur 8-1 Kanalen vid stillastående läge. Figur 8-2 Kanalen vid max position till höger. Figur 8-3 Kanalen vid max position till vänster. 33 Pneumatiska artificiella muskler Figure 8-4 Muskeln till vänstar innehar maximal tryck då muskeln till höger har noll i tryck. Figure 8-5 Muskeln till höger innehar maximal tryck då muskeln till vänster har noll i tryck. Figure 4 Båda muskler innehar lika stor mängd tryck, 2bar. 34 Pneumatiska artificiella muskler Figur 8-5 kretsschema för LP-filter och förstärkare. 35 Pneumatiska artificiella muskler Figur 8-6 Elschema. 36 Pneumatiska artificiella muskler Figur 8-7 Översikt av reglersystem. 37 Pneumatiska artificiella muskler 38 Pneumatiska artificiella muskler ALBERT HOXHA född 1985 i Kosovo men uppvuxen i Varberg. Studerar för tillfället Masterprogrammet inom inbyggda och intelligenta system och beräknas bli klar under hösten 2013. ZEJNULLA IBRAIMI född 1985 i Kosovo men uppvuxen i Hedemora Dalarna. Studerar för tillfället Masterprogrammet inom inbyggda och intelligenta system. 39