Laboration 2 Mekanik baskurs
advertisement

(Sensur)
Laboration 2 Mekanik baskurs Utförs av: Henrik Bergman Mubarak Ali Uppsala 2015­01­19 Introduktion Friktionskraft är en förutsättning för att våra liv ska fungera på ett mindre omständigt sätt. Om friktionskraften inte existerande skulle du troligen ha stora problem att sitta där du sitter just nu, pga att du skulle halka av stolen. I denna rapport beskrivs hur vi studerat friktionskraften, samt bestämt den statiska och kinestetiska friktionskoefficient för ytan mellan ett lutande plan och en träkloss. Teori Det finns flera olika modeller för att beskriva det komplicerade fenomen friktion. En relativt lätt modell förbättrades dock år 1699 av Guillaume Amontons. Han förbättrade Leonardo da Vincis teorier om friktion. Han påstod att friktionskraften var direkt proportionell mot normalkraften som utövade på objektet, därav skulle friktion vara helt oberoende av kontaktytornas area.1 De är dock viktigt att inse att denna modell kräver att man delar in friktionen i
statisk och kinetisk friktion: Statisk friktion
(friktion i vila) är den motriktade kraft som förhindrar t.ex en låda att röra sig om den utsätts för en extern kraft, då den inte har någon rörelse (refererat till underlaget). Så fort en rörelse sker kommer den statiska friktionskraften ersättas med en kinestetisk friktionskraft. Den maximala statisk friktionen mellan två ytor är proportionell mot den normalkraft som utövas på ytorna enligt. F Max
s = μ sN Där N
är normalkraft och μ s
är den statisk eller vilofriktionskoefficient. Ekvationen ovan anger den Max
maximala friktionskraft F s
. 1
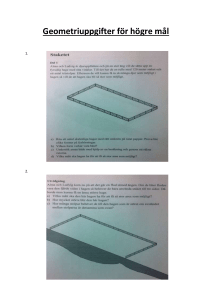
http://link.springer.com/referenceworkentry/10.1007%2F978­0­387­92897­5_166 Fig.1 visar de krafter som påverkar klossen precis innan den börjar röra sig då kraften F
a ökar
långsamt. Alltså bör Enligt NII: ∑ F j = 0 ⇒ N + mgcos θ = 0 ⇒ N =− mgcos θ j
j
(
(1) )
∑ F i = F a ⇒ F s + mg sin θ = 0 ⇒ F a = |mg| sin θ − μ s ||N || i (2) i
F Max
s =
μ s ||N || (3) Vilket genom ekv (1),(2)&(3) efter förenkling ger följande för μ s : F s =− mg sin θ ⇒ {(1), (2)&(3)} ⇒ μ s = tan θ Kinetisk friktion
(friktion i rörelse) i den motriktade kraft som motverkar lådans rörelse framåt. Den är proportionell mot normalkraft och den kinetisk friktionskoefficient. F k = μ kN Där N är normal kraft och μk är den kinetisk friktionskoefficienten. Kinetisk friktionskoefficienten är konstant under lådans rörelse. Storleken på kinetisk friktion är oftast lägre än den statiska friktionskraft. Därav kan man dra slutsatsen att i de flesta fall är den kinetisk friktionskoefficienten lägre än den statiska friktionskoefficienten: μk ≤ μ s Där μk är den kinetisk friktionskoefficienten och μ s
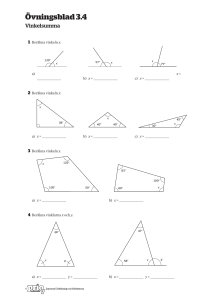
är den statisk eller vilofriktionskoefficient. I vårat fall tillämpade vi teorin på följande sätt: De som alltså intresserar oss är den kinestetiska friktionskraften F k som kan beräknas genom följande procedur: Fig.2 visar de krafter som påverkar en låda som glider ner för ett pla
n. Tillämpar vi Newtons andra lag på detta problem efter att ha delat upp det i komponenter får vi: ∑ F i = ma = F a ⇒ F k + mg sin θ = F a
(1) ∑ F j = 0 ⇒ N + mgcos θ = 0 (2) i
j
Vi vet även följande: F k = μkN
(3) F a = ma
(4) Genom ekv. (2) erhåller vi N som sedan kan sättas in i ekv. (3) och tillsammans med ekv. (4) sätts in i (1) ger följande: − μkmg cos θ + mg sin θ = maa ⇒ {U tlösning av μk} ⇒ ⇒
μk =
aa−g sin θ
−g cos θ
[2 ] Ett ungefärligt värde på friktionskoefficienten bör vara någonstans kring 0.4.
Metod och materiel: Utrustning: Träkloss, lutande rullbana, lägessensor, handdator och linjal Metod: Kinestetiska friktionskoefficient För att mätta den kinesiska friktionskoefficient
placerades en rullbana med ena änden upphöjd så att det bildades en vinkel mellan horisontalplanet och rullbanan (enligt fig. 1 el. fig. 2). Högst upp på rullbanan placerades en lägessensorn för att sedan kopplas till en handdator. Vinkeln mellan bordet (“horisontalplanet”) och rullbanan mätts (se avsnitt Teori för matematiska formler). Därefter lät vi vagnen rulla ner för rullbanan (plantet) medans en handdator mätte hastigheten som funktion av tiden på handdatorn. Med hjälp av Delta Tool (Differensmätning) på handdatorn mättes v och t vars kvot ger lutning på kurvan (vt=a) som motsvarar vagnen acceleration. Experimentet upprepades fyra uttligare gånger. Därefter beräknades friktionskoefficienten med följande formel (se avsnitt teori): μk =
2
aa−g sin θ
−g cos θ http://www.lastbilsteori.se/friktionskoefficienter.html Statiska friktionskoefficienten För att mätta den statiska friktionskoefficienten är en metod att börja med att placera träklossen på planet och därefter öka vinkeln tills klossens statiska friktionskraft blir precis mindre än den projicerade gravitationskraften utmed planet (alltså att den börjar röra på sig). Sedan mätta vinkeln och räkna fram den kraft F a som blidar kraftpar med F s alltså F a + F s = 0 (se Teori). Därefter kan man enkelt räkna ut μ s
genom följande formel: μ s =
sin θ
cos θ Resultat
: Kinetisk friktionskoefficient För beräkning av vinkeln mellan horisontalplanet och rullbanan. Användes den trigonometriska funktionen Sinus. Då längd uppmättes till 210 cm, och höjden utmed en vertikallinje var 98 cm. Vilket vi fick vi en vinkeln θ = 27.8o . Enligt: 98
Sin−1 Lh = θ θ = Sin−1210
= 27.8o . Klossens acceleration räknades fram fem gånger vilket gav följande fem värden: μk =
försök nr. acceleration (m/ s 2 ) 1 1.146 2 1.04 3 1.08 4 0.96 5 1.15 medel 1.08 1.08−9.81 sin 27.8 −9.81 cos 27.8 = 0.40 μk = 0.40 Statisk friktionskoefficient För beräkning av vinkeln mellan horisontalplanet och rullbanan, användes den trigonometriska funktionen Sinus. Då längd uppmättes till 210 cm, och höjden ut med en vertikallinje var beskrivs i tabellen neden
. Enligt: försök nr. höjden (cm) 1 86 2 95 3 90 4 82 5 87 medel 88 88
Sin−1 Lh = θ θ = Sin−1210
= 24.8o . sin 24.8
μ s = cos 24.8
= 0.46 μ s = 0.46 Diskussion Resultat stämde ganska bra överrens med våra förväntningar baserat på teroin. Av att bedömma de värden för μ s och μk som erhållits kan vi dra slutsatsen att de inte är orimliga. Enligt teorin så skall det vara följande samband: μk ≤ μ s 0.40 < 0.46 Vilket enligt våra värden är uppfyllt. Däremot existerar friktion i form av luftmotstånd som utgör en motverkande kraft som vi i vår teori har försummats. Eftersom klossen inte väger så mycket leder detta till att luftmotståndet har relativt stor inverkan. Vilket skulle påverka vår resultat genom att den kinestetiska friktionskoefficienten upplevs ha högre värde än de faktiska. Källan som vi använde oss av för jämförelse av friktionskoefficient under teorin (
http://www.lastbilsteori.se/
) är enligt oss är ganska trovärdig. I vilket fall bör den duga för jämförelse som är vårat syfte. Källan för teorin (
http://link.springer.com/
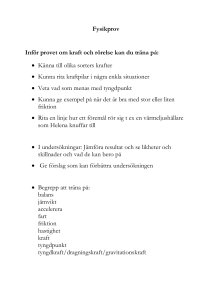
) är angagligen ganska pålitlig. Oavsätt har vi ändå fått det bekräftat att detta stämmer av sakkunniga personer inom givet ämne på Uppsala Universitet genom föreläsningar. Slutsats Vi har visat att friktionskoefficienten mellan två ytor (trä och aluminium) är runt 0.4. Vilket vi bedömmer som trovärdigt. De vi har visat genom våra försök är följade μk < μ s . Detta samband kan finnas logiskt då ytorna som är i kontakt inte är helt slätta. I ett statiskt läge kommer alltså atomerna att “haka” i varandra vilket ger ett högre motstånd (se fig. 3 vänster). Det kinestetiska tillståndet eller objekt i rörelse så kommer ytorna att ha mindre kontakt med varandra och därför kan inte lika mycket ojämnheter “haka fast” i varandra (Se fig. 3 höger). Fig. 3. visar en förstorning av kontaktytan mellan klossen/trät och aluminiumskenan/rullplanet i två olika lägen, statiskt och kinestetiskt. Felkällor ●
●
Ingen mätning har gjorts för att fastställa att underlaget som planet stod på är helt vertikalt (eller vinkelrät med riktningen på jordaccerelationen) vilket det inte säkert inte Friktion i form av luftmotstånd utgör en motverkande kraft. Vilket skulle påverka vår resultat genom att den kinestetiska friktionskoefficienten upplevs ha högre värde än de faktiska ●
●
●
Planet som klossen glider ner för antogs vara helt rakt men troligen bognar den av sin egen vikt. Vilket medför att accerelationen inte är helt linjär Stor onoggrannhet vid beräkning av vinkeln mellan planet och ytan den stod på som antogs vara horisontell Onoggrannhet vid mättning för att ta fram vinkeln för den statiska friktionskoefficienten.