VRIDMOMENT (ELLER KRAFTMOMENT)
advertisement
")
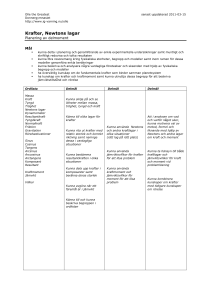
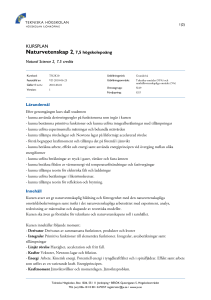
Armin Halilovic: EXTRA ÖVNINGAR Vridmoment (eller kraftmoment) VRIDMOMENT (ELLER KRAFTMOMENT) (Tillämpning av vektorprodukten) 1. Vridmoment ( kraftmoment) med avseende på en punkt F n F r P O d Om kraften F har sin startpunkt (angreppspunkt) i P då vridmoment M ( betecknas även τ ) kring punkten O beräknas enligt följande: M= | r || Fn |=| r || F | sin θ , → där r = OP och θ betecknar vinkeln mellan r och F Samma resultat får vi om med M= d | F |=| r || F | sin θ . Alltså M =| r × F | Om vi inför momentvektor M = r × F då har vi M= | M |=| r × F | Uppgift 1 Låt F =(2,–1,3) vara en kraft med startpunkt (angreppspunkt) i P=(2,3,4). Beräkna momentvektor M = r × F och vridmoment | M | kring punkten O(1,1,1). Lösning: → r = OP =(1,2,3), j i Momentvektorn kring O är M = r × F = 1 2 2 −1 Kraftens vridmoment kring punkten O blir M= | M standardenheter) k 3 = (9,3,–5) 3 |= 115 ( Newtonmeter i ======================================================= 1 av 4 Armin Halilovic: EXTRA ÖVNINGAR Vridmoment (eller kraftmoment) 2. Vridmoment ( kraftmoment) med avseende på en linje ( vridningsaxel) . Låt L vara en linje genom punkten O med enhetsriktningsvektor e (alltså | e | =1) . Låt F vara en kraft med startpunkt (angreppspunkt) i punkten P. → Vi betecknar r = OP . Vridmoment ( kraftmoment) ML för kraften , F med angreppspunkten i P, runt linjen L kan beräknas med följande formel: ML= | e ⋅ M | där M = r × F Alltså ML= | e ⋅ ( r × F ) | L F P e π r O rπ Fπ Anmärkning1. Utrycket ML= | e ⋅ ( r × F ) | är positivt om e , r , F bildar ett högersystem [ då blir rotationen av P som orsakas av kraften F positiv ( moturs), när vi betraktar från spetsen av e ] Anmärkning2. Uttrycket ML= | e ⋅ ( r × F ) | ( absolutbeloppet av en trippelprodukt) kan vi beräkna med två metoder a)Stegvismetod: Först vektorprodukten sedan skalärprodukten och slutligen absolutbeloppet. b) Vi kan också använda determinanten för att beräkna trippelprodukten e ⋅ ( r × F ) och därefter absolutbeloppet. e x e y ez Alltså ML= | e ⋅ ( r × F ) |=| rx ry rz | Fx Fy Fz Anmärkning 3. Ett anat sätt att beräkna vridmoment ML är att bestämma projektioner av 2 av 4 Armin Halilovic: EXTRA ÖVNINGAR Vridmoment (eller kraftmoment) r och F på planet π som går genom O vinkelrät mot L. Därefter blir M L =| rπ × Fπ | . Uppgift 2. Låt L vara en linje genom punkten O(0,0,0) med enhetsriktningsvektor 1 e= (1,1,1) Låt F = (1,-2, 5) vara en kraft med startpunkten (angreppspunkten ) i 3 P=(2,1,3) . Beräkna vridmoment ML= | e ⋅ M | runt linjen L för kraften F , med angreppspunkten i P. Lösning: Metod 1. (Först vektorprodukten sedan skalärprodukten och slutligen absolutbeloppet.) → r = OP = (2,1,3) . i j k Momentvektor M = r × F = 2 1 3 = (11 , –7, –5) 1 −2 5 1 , ( minus tecken visar att vridning sker i negativ riktning, dvs medurs, om vi e⋅M = − 3 betraktar från spetsen av e ) 1 Till slut ML= | e ⋅ M | = ( i Newtonmeter, om alla storheter är i standardenheter) 3 e x e y ez 1 1 1 1 1 −1 Metod 2. ML= | e ⋅ ( r × F ) |=| rx ry rz | = | |= 2 1 3 |= ... =| 3 3 3 Fx Fy Fz 1 −2 5 Svar: ML= 1 3 Anmärkning 4. Om vi betraktar vridning kring z-axeln och dessutom punkten P och kraften F ligger i xy-planet dvs P= ( x, y , 0) , F =( Fx,Fy,0) då har vi: → r = OP =(x,y,0), e = k = (0,0,1) och därmed 0 Vridningsmoment Mz= | e ⋅ ( r × F ) |= x Fx 0 y Fy 1 x 0 =| Fx 0 y |=| xFy − yFx | Fy ( Notera att positiv ( moturs) vridning svarar mot xFy − yFx > 0 ) Uppgift 3. Beräkna vridningsmoment kring z-axeln för kraften F =(2,1,0) med angrepspunkten i P(3,5,0). Avgör om kraften orsakar positiv (moturs) eller negativ (medurs) vridning. Lösning: 3 av 4 Armin Halilovic: EXTRA ÖVNINGAR Vridmoment (eller kraftmoment) Mz= | 3 ⋅ 1 − 5 ⋅ 2 | = |–7|=7 (Nm) Vridningen är negativ, dvs medurs, eftersom xFy − yFx = −7 < 0 ======================================================== Villkoret för både translationsjämvikt och rotationsjämvikt: Om en kropp påverkas av flera krafter (“kraftsystem”) F1 , F2 ,...Fn då är kroppen i jämviktsläge om både summan av krafterna och summan av deras momentvektorer (kring en godtyckligt vald punkt) är 0 , dvs F ( translationsjämvikt ) ∑k k = 0 och ∑ M k = 0 . ( rotationsjämvikt) k 4 av 4