SF1624 Algebra och geometri Tentamen 13 mars 2015
advertisement

SF1624 Algebra och geometri
Tentamen
13 mars 2015
Skrivtid: 8.00-13.00
Tillåtna hjälpmedel: inga
Examinator: Roy Skjelnes
Tentamen består av nio uppgifter som vardera ger maximalt fyra poäng.
Del A på tentamen utgörs av de tre första uppgifterna. Till antalet erhållna poäng från del A adderas dina bonuspoäng. Poängsumman på del A kan dock som högst bli 12 poäng. Bonuspoängen
beräknas automatiskt. Antal bonuspoäng framgår från resultatsidan.
De tre följande uppgifterna utgör del B och de tre sista uppgifterna del C, som främst är till
för de högre betygen.
Betygsgränserna vid tentamen kommer att ges av
Betyg
A B C D E Fx
Total poäng
27 24 21 18 16 15
varav från del C 6 3 – – – –
För full poäng på en uppgift krävs att lösningen är väl presenterad och lätt att följa. Det innebär
speciellt att införda beteckningar ska definieras, att den logiska strukturen tydligt beskrivs i ord
eller symboler och att resonemangen är väl motiverade och tydligt förklarade. Lösningar som
allvarligt brister i dessa avseenden bedöms med högst två poäng.
Var god vänd!
2
SF1624 Algebra och geometri — Tentamen 15.03.13
D EL A
1. Planet H ges av ekvationen 3x − 2y + 5z + 1 = 0.
a) Bestäm en linje N som är vinkelrät mot H.
b) Bestäm en linje L som inte skär planet H.
2. Låt e~1 , e~2 , e~3 vara standardbasen för R3 . Betrakta den linjära avbildningen F : R3
som är definierad genom
1
2
1
F (e~1 ) =
, F (e~2 ) =
och F (e~3 ) =
.
0
−1
1
−3
(a) Bestäm F (~v ) där ~v = 1 .
1
(b) Bestäm dimensionen av nollrummet Ker(F ), och bildrummet Im(F ).
(c) Bestäm en bas för nollrummet Ker(F ).
3. (a) Vad menas med begreppet egenvektor?
(b) Avgör vilka vektorerna
1
10
1
1
~x =
, ~y =
, ~z =
och w
~=
5
−2
1
−1
1 5
som är egenvektorer till matrisen A =
.
1 5
(c) Bestäm egenvärden och tillhörande egenrum till matrisen A.
(2 p)
(2 p)
→ R2
(1 p)
(2 p)
(1 p)
(1 p)
(2 p)
(1 p)
SF1624 Algebra och geometri — Tentamen 15.03.13
3
D EL B
4. I R4 har vi, för varje tal a, följande tre vektorer
2
1
a
2
~v1 =
0 , ~v2 = 1 och
3
−1
4
2
~v3 =
3 .
11
Vi låter V = Span(~v1 , ~v2 , ~v3 ) vara deras linjära hölje.
(a) Bestäm för vilka värden a vektorrummet V har dimension tre.
(b) Låt a = 1, och bestäm en bas till det ortogonala komplementet V ⊥ .
(2 p)
(2 p)
5. (a) Definiera vad som menas med koordinatvektorn för en vektor med avseende på en
bas.
(1 p)
2
(b) Betrakta följande vektorer i R :
1
1
~v =
och w
~=
.
2
−1
Bestäm en bas B för R2 sådan att koordinatvektorn för ~v är w
~ och koordinatvektorn
för w
~ är ~v .
(3 p)
a
c
6. Låt ~v =
och ~n =
vara två nollskilda vektorer i R2 , där ac + bd = 0. Låt L vara
b
d
det linjära höljet till ~v .
(a) Varför är β = {~v , ~n} en bas för R2 ?
(1 p)
(b) Låt T : R2 → R2 vara speglingen om linjen L. Bestäm matrisrepresentationen B till
T med avseende på basen β.
(1 p)
(c) Låt P vara basbytesmatrisen från standardbasen till β. Bestäm P −1 BP .
(2 p)
Var god vänd!
4
SF1624 Algebra och geometri — Tentamen 15.03.13
D EL C
7. Talföljden {f0 , f1 , f2 , f3 , . . . , } satisfierar följande rekursiva formel
fn+2 = 2fn+1 + 8fn ,
(∗)
för alla n ≥ 0. De två första termerna i talföljden är kända, f0 = a och
f1 = b. Uttryck
fn+1
fn+1 som en sluten formel i a och b. (Tips: Beteckna F (n + 1) =
och skriv
fn
ekvationen (*) på matrisform).
(4 p)
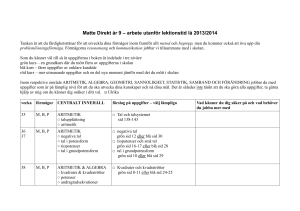
8. Betrakta följande två figurer. (Vid varje punkt anges dess koordinater i ett vanligt cartesiskt
koordinatsystem.)
(11/2,13/2)
(3/2,9/2)
(3,3)
(5,3)
(13/2,9/2)
(6,3)
(0,2)
(4,1)
(4,2)
(2,0) (3,0)
(−3,1)
(a) Bestäm en linjär avbildning T : R2 → R2 som transformerar den vänstra figuren till
den högra. Du ska ange matrisen för T .
(2 p)
(b) Bestäm arean för det inneslutna området i den högra figuren.
(2 p)
9. Om A, B, C och D är kvadratiska matriser av samma storlek kan vi bilda en större kvadratisk matris som blockmatrisen
A B
M=
.
C D
Antag att A är inverterbar och att matriserna A och C kommuterar med varandra, dvs att
AC = CA. Visa att
(4 p)
det(M ) = det(AD − CB).
(Du kan använda fritt att om B eller C är noll-matrisen, då gäller att det(M ) = det(AD).)
SF1624 Algebra och geometri
Lösningsförslag till tentamen 15.03.13
D EL A
1. Planet H ges av ekvationen 3x − 2y + 5z + 1 = 0.
a) Bestäm en linje N som är vinkelrät mot H.
(2 p)
b) Bestäm en linje L som inte skär planet H.
(2 p)
3
Lösningsförslag. a) Vi vet att vektorn ~n = −2 är vinkelrät mot planet H. Därmed vill
5
varje linje på formen {P + t · ~n | tal t} vara vinkelrät
mot H, för varje vald punkt P . T.ex
3t
kan vi välja P som origo, och vi har att linjen −2t (parameter t) är vinkelrät mot H.
5t
b) Vi väljer två punkt Q och R i planet, och bildar vektorn ~v = R − Q. Då vill varje
linje på formen {P + t~v | tal t} vara parallell med planet H. Om vi sedan väljer punkten
P att inte ligga i planet, har vi en linje som inte skär H. Vi väljer punkterna
−2
−1
Q = −1 och R = 0 ,
1
0
0
−1
vilket ger ~v = 1 . Och vi väljer P = 0. Detta ger oss linjen
0
1
−t
{ t | tal t}.
t
Svar.
2
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
2. Låt e~1 , e~2 , e~3 vara standardbasen för R3 . Betrakta den linjära avbildningen F : R3
som är definierad genom
1
2
1
F (e~1 ) =
, F (e~2 ) =
och F (e~3 ) =
.
0
−1
1
−3
(a) Bestäm F (~v ) där ~v = 1 .
1
(b) Bestäm dimensionen av nollrummet Ker(F ), och bildrummet Im(F ).
(c) Bestäm en bas för nollrummet Ker(F ).
→ R2
(1 p)
(2 p)
(1 p)
Lösningsförslag.
1 2 1
(a) Standardmatrisen för F är
, så
0 −1 1
−3
0
1 2 1
1 =
.
F (~v ) =
0
0 −1 1
1
(a) Standardmatrisen Gauss-reduceras till
1 0 3
.
A=
0 1 −1
Man konstaterar att rangen av standardmatrisen är 2, vilket betyder att dim Im(F ) =
2. Enligt dimensionssatsen är dim R3 = dim Im(F ) + dim Ker(F ) och alltså är
dim Ker(F ) = 1.
(b) Eftersom dim Ker(F ) = 1utgör varje enskild vektor ~v 6= ~0 som uppfyller F (~v ) = 0
−3
en bas. Från (a) följer att { 1 } är en bas.
1
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
3
3. (a) Vad menas med begreppet egenvektor?
(b) Avgör vilka vektorerna
1
10
1
1
~x =
, ~y =
, ~z =
och w
~=
5
−2
1
−1
1 5
som är egenvektorer till matrisen A =
.
1 5
(c) Bestäm egenvärden och tillhörande egenrum till matrisen A.
(1 p)
(2 p)
(1 p)
Lösningsförslag.
(a) Att ~x är en egenvektor till matrisen A betyder att ~x är nollskild och parallell med A~x,
dvs att det finns en skalär λ så att A~x = λ~x.
(b) För att se vilka av vektorerna som är egenvektorer multiplicerar vi dem med matrisen
och ser om resultatet är parallellt med vektorn.
Vi får
1 5 1
1·1+5·5
26
A~x =
=
=
som inte är parallell med ~x,
1 5 5
1·1+5·5
26
1 5 10
1 · 10 + 5 · (−2)
0
A~y =
=
=
som är parallell med ~y ,
1 5 −2
1 · 10 + 5 · (−2)
0
1 5 1
1·1+5·1
6
A~z =
=
=
som är parallell med ~z
1 5 1
1·1+5·1
6
och
1 5
1
1 · 1 + 5 · (−1)
−4
Aw
~=
=
=
som är inte parallell med ~y .
1 5 −1
1 · 1 + 5 · (−1)
−4
Alltså ser vi att ~y och ~z är egenvektorer, medan ~x och w
~ inte är det.
(c) Från beräkningen i del (b) ser vi att ~y är en egenvektor med egenvärde 0 och ~z är
en egenvektor med egenvärde 6. Eftersom det högt kan finnas två olika egenvärden
måste dessa vara samtliga och motsvarande egenrum ges av multiplerna av vektorerna
~y och ~z.
Svar.
(b) ~y och ~z är egenvektorer till A.
(a) Egenvärdena är 0 med egenrum Span{~y } och 6 med egenrum Span{~z}.
4
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
D EL B
4. I R4 har vi, för varje tal a, följande tre vektorer
1
2
2
a
~v1 =
0 , ~v2 = 1 och
−1
3
4
2
~v3 =
3 .
11
Vi låter V = Span(~v1 , ~v2 , ~v3 ) vara deras linjära hölje.
(a) Bestäm för vilka värden a vektorrummet V har dimension tre.
(b) Låt a = 1, och bestäm en bas till det ortogonala komplementet V ⊥ .
(2 p)
(2 p)
Lösningsförslag.
a) Vektorrummet V har dimension tre om (och endast om) vektorerna ~v1 ,~v2 och ~v3 är
linjärt oberoende. Detta är ekvivalent med att matrisen
1 2 4
2 a 2
A=
0 1 3
−1 3 11
har rang tre. Matrisens rang bestämmer vi med hjälp av elementära radoperationer.
1 2
4
1
2
4
1
2
4
1 2 4
2 a 2 0 a − 4 −6 0
3
1
3
∼ 0 1
∼
∼
0 1 3 0
1
3 0 a − 4 −6 0 0 6 − 3a
0 0
0
0
5 15
0
5 15
−1 3 11
Matrisen A har rang 3 om (och endast om) 6 − 3a 6= 0 dvs om a 6= 2. Därmed har V
dimension 3 om a 6= 2.
x
y
b) Det ortogonala komplementet V ⊥ består av alla vektorer ~u =
z som är ortogow
nala mot basvektorerna
2
4
1
2
, ~v2 = 1 och ~v3 = 2 .
~v1 =
3
0
1
−1
3
11
Detta betyder att ~v1 · ~u = 0, ~v2 · ~u = 0 och ~v3 · ~u = 0. Skriver vi ut detta erhåller vi
det homogena ekvationssystemet
x + 2y − w = 0
2x + y + z + 3w = 0
4x + 2y + 3z + 11w = 0.
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
Vi gör elementära radoperationer på totalmatrisen till systemet
1 2 0 −1
1 2 0 −1
1 2 0 −1
1 0 0 −1
2 1 1 3 ∼ 0 −3 1 5 ∼ 0 −3 1 5 ∼ 0 1 0 0
4 2 3 11
0 −6 3 15
0 0 1 5
0 0 1 5
Vi betecknar w = t och får z = −5t, y = 0 och x = t. Alltså har vi att
1
0
V ⊥ = {t
−5 | tal t}.
1
1
0
⊥
Härav följer att vektorn
−5 är en bas till V .
1
Svar.
5
6
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
5. (a) Definiera vad som menas med koordinatvektorn för en vektor med avseende på en
bas.
(1 p)
(b) Betrakta följande vektorer i R2 :
1
1
~v =
och w
~=
.
2
−1
Bestäm en bas B för R2 sådan att koordinatvektorn för ~v är w
~ och koordinatvektorn
för w
~ är ~v .
(3 p)
Lösningsförslag. a) Låt β = {~e1 , . . . , ~en } vara en bas för vektorrummet V , och låt ~x vara
en vektor. Då kan ~x uttryckas som
n
X
~x =
ai~ei ,
i=1
för några skalärer a1 , . . . , an . Den ordnade sekvensen av skalärer
a1
a2
~x β =
...
an
kallas koordinatvektorn till ~x med avseende på basen β.
b) Låt {~e, f~} vara den sökta basen för R2 . Kraven är att ~v = ~e − f~ och att w
~ = ~2 + 2f~.
Dessa två krav kan vi skriva som
~v
1 −1 ~e
.
=
w
~
1 2
f~
Inverterar vi 2 × 2-matrisen, får vi sambandet att
~e
1 2 1 ~v
= ~ .
~
f
3 −1 1 w
Med andra ord har vi att
2
1
2 1
1 1
1
~e = ~v + w
~=
+
=
2
−1
1
3
3
3
3
och
Svar.
1
1
1
1
1
1
0
f~ = − ~v + w
~ =−
+
=
.
2
−1
−1
3
3
3
3
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
7
a
c
6. Låt ~v =
och ~n =
vara två nollskilda vektorer i R2 , där ac + bd = 0. Låt L vara
b
d
det linjära höljet till ~v .
(a) Varför är β = {~v , ~n} en bas för R2 ?
(1 p)
2
2
(b) Låt T : R → R vara speglingen om linjen L. Bestäm matrisrepresentationen B till
T med avseende på basen β.
(1 p)
(c) Låt P vara basbytesmatrisen från standardbasen till β. Bestäm P −1 BP .
(2 p)
Lösningsförslag.
a) Två vektorer i ett tvådimensionellt vektorrum bildar en bas om och endast om de är
linjärt oberoende. Noll-skilda vektorerna~v och ~n är ortogonala eftersom skalärprodukten
~v · ~n = ac + bd = 0. Detta medför att ~v och ~n är två linjärt oberoende vektorer och
därmed bildar de en bas i R2 .
b) Vid speglingen i linjen L = Span(~v ) avbildas~v på~v och ~n på −~n. Från T (~v ) = ~v =
1 · ~v + 0 · ~n och T (~
n) = −~n= 0 · ~v − 1 · ~n får vi att avbildningens matris i basen
1
0
β = {~v , ~n} är B =
.
0 −1
a c
är övergångsmatrisen från β till standardbasen. Därmed är
c) Matrisen Q =
b d
d −c
1
−1
P = Q = ad−bc
övergångsmatrisen från standardbasen till β. Härav
−b
a
1
a c
1
0
d −c
−1
P BP =
b d
0 −1 ad − bc −b
a
1
1
d −c
a c
ad + bc
−2ac
=
.
b −a
2bd −bc − ad
ad − bc b d
ad − bc
Anmärkning: Om b 6= 0 och vi substituerar d = −ac/b, kan vi förenkla svaret till
2
1
a − b2
2ab
−1
P BP = 2
.
2ab b2 − a2
a + b2
c’) Alternativt: Eftersom P −1 BP är avbildningens matris i standardbasen
kan vi beräkna
x
matrisprodukten genom att avbilda en godtyckligt vektor. Låt ~u =
vara en vektor
y
i R2 . Vi har att
~u = projL (~u) + (~u − projL (~u)).
Detta ger
att T (~u) = 2 projL (~u) − ~u. Vi har att linjen L spänns upp av vektorn
a
~v =
, och vi erhåller att
b
~u · ~v
ax + by a
x
T (~u) = 2
~v − ~u = 2 2
−
2
b
y
~v · ~v
a +b
8
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
"
=
"
Alltså är
2a2 x+2aby
a2 +b2
2abx+2b2 y
a2 +b2
a2 −b2
a2 +b2
2ab
a2 +b2
2ab
a2 +b2
2
b −a2
a2 +b2
#
−
x
y
"
=
a2 −b2
a2 +b2
2ab
a2 +b2
2ab
a2 +b2
2
b −a2
a2 +b2
#
x
y
#
avbildningens matris i standard basen och därmed är
"
P −1 BP =
a2 −b2
a2 +b2
2ab
a2 +b2
2ab
a2 +b2
b2 −a2
a2 +b2
#
.
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
9
D EL C
7. Talföljden {f0 , f1 , f2 , f3 , . . . , } satisfierar följande rekursiva formel
fn+2 = 2fn+1 + 8fn ,
(∗)
för alla n ≥ 0. De två första termerna i talföljden är kända, f0 = a och
f1 = b. Uttryck
fn+1
fn+1 som en sluten formel i a och b. (Tips: Beteckna F (n + 1) =
och skriv
fn
ekvationen (*) på matrisform).
(4 p)
Lösningsförslag. Vi har att F (n + 1) = AF (n), där
2 8
A=
.
1 0
Det följer då att F (n +1) = An F (1). Om vi betraktar matrisen A som en linjär avbildning
på R2 , så har vi att A = P DP −1 där P är övergångsmatrisen från en bas av egenvektorer
till standardbasen, och där D är en diagonalmatris med egenvärden på diagonalen. Specielt
vill vi använda detta för att beräkna An .
Det karakteristiska polynomet till A är c(λ) = (λ − 2)λ − 8. Nollställerna är
0 = c(λ) = λ2 − 2λ + 1 − 9 = (λ − 1)2 − 9.
Det vill säga, λ = −2 och λ = 4. Vi bestämmer sedan de tillhörande
För
egenrummen.
2
λ = −2 ges egenrummet av ekvationen x + 2y = 0. En bas är ~e =
. Egenrummet
−1
4
tillhörande egenvärdet λ = 4 ges av ekvationen x − 4y = 0. En bas är f~ =
. Detta ger
1
övergångsmatriserna
1 1 −4
2 4
−1
.
och P =
P =
−1 1
6 1 2
Vi har att
(−2)n 0
A = PD P = P
P −1
0
4n
2n 2 4 (−1)n 0 1 −4
=
0
2n 1 2
6 −1 1
2n−1 (−1)n · 2 4 · 2n 1 −4
=
(−1)n+1
2n
1 2
3
2n−1 (−1)n · 2 + 4 · 2n (−1)n+1 · 8 + 8 · 2n
=
.
(−1)n+1 + 2n
(−1)n · 4 + 2n+1
3
n
n
10
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
Vi har att F (n + 1) = An F (1), vilket ger att
2n−1 fn+1 =
(−1)n · 2 + 4 · 2n b + (−1)n+1 · 8 + 8 · 2n a
3
n
2
2n+2
= ((−1)n + 2n+1 )b +
((−1)n+1 + 2n )a.
3
3
Svar.
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
11
8. Betrakta följande två figurer. (Vid varje punkt anges dess koordinater i ett vanligt cartesiskt
koordinatsystem.)
(11/2,13/2)
(3/2,9/2)
(3,3)
(5,3)
(13/2,9/2)
(6,3)
(0,2)
(4,1)
(4,2)
(2,0) (3,0)
(−3,1)
(a) Bestäm en linjär avbildning T : R2 → R2 som transformerar den vänstra figuren till
den högra. Du ska ange matrisen för T .
(2 p)
(b) Bestäm arean för det inneslutna området i den högra figuren.
(2 p)
Lösningsförslag.
(a) Det gäller först att lista ut vilka punkter i den vänstra figuren som ska avbildas på
vilka punkter i den högra figuren.
Låt
oss
ge namn
åt tre (ortsvektorer till) punkter i
den vänstra figuren: p~ := 02 , ~q := 20 och ~r := 30 .
Eftersom ~q = 32 ~r och T är linjär så måste T (~q) = 32 T (~r). Dom enda punkter i den
högra
denna relation är (4, 2) och (6, 3) så vi måste ha T (~q) =
4 figuren som uppfyller
6 . I den vänstra figuren är p
och
T
(~
r
)
=
2
3
−3 ~ granne till ~q, så vi vill att T (~p) ska
vara granne till T(~q) ochdåmåste T(~p) = 1 .
Ekvationerna T ( 20 ) = 42 och T ( 02 ) = −3
ger tillsammans att matrisen för T
1
måste vara
1 4 −3
.
A=
2 2 1
En kontroll visar att A avbildar även dom andra punkterna korrekt:
3
3/2
5
11/2
4
13/2
A
=
, A
=
, A
=
.
3
9/2
3
13/2
1
9/2
(b) Om vi ritar in några hjälplinjer i den vänstra figuren blir det lätt att beräkna arean av
dess inneslutna område.
(3,3)
(5,3)
(0,2)
(4,1)
(2,0)
(3,0)
12
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
Dom skuggade trianglarna har arean 3/2 och 1, och den resterande arean är 5 + 23 .
Alltså blir den totala arean av det vänstra området 32 + 1 + 5 + 32 = 9. Determinanten
av A är (1/2)2 · (4 · 1 − (−3) · 2) = 5/2 så det högra området har arean 9 · 52 = 45/2.
SF1624 Algebra och geometri — Lösningsförslag till tentamen 15.03.13
13
9. Om A, B, C och D är kvadratiska matriser av samma storlek kan vi bilda en större kvadratisk matris som blockmatrisen
A B
M=
.
C D
Antag att A är inverterbar och att matriserna A och C kommuterar med varandra, dvs att
AC = CA. Visa att
(4 p)
det(M ) = det(AD − CB).
(Du kan använda fritt att om B eller C är noll-matrisen, då gäller att det(M ) = det(AD).)
Lösningsförslag. Då matrisen A−1 existerar kan vi konstruera matrisen
I
0
,
−A−1 C I
där I är identitetsmatrisen, och 0 är noll-matrisen. Båda av samma storlek som matriserna A, B, C och D. Den konstruerade matrisen har uppenbarligen determinant 1. Detta
betyder att matrisen, som ges av produkten,
I
0 A B
−A−1 C I C D
har den sökta determinanten det(M ). När vi beräknar produkten ovan erhåller vi matrisen
A
B
.
−A−1 CA + C −A−1 CB + D
Vi använder nu att CA = AC. Blocket längst ned till vänster blir då −A−1 CA + C =
−A−1 AC + C = −C + C = 0. Vi använder sedan att vi känner till determinanten för
blockmatriser där ena blocket är noll, dvs att
A
B
det(
) = det(A) det(−A−1 CB + D).
0 −A−1 CB + D
Detta betyder att den sökta determinanten är det(M ) = det(A) det(−A−1 CB + D). Vi
vet från kursen att determinanten bevarar produkt, så
det(A) det(−A−1 CB + D) = det(A(−A−1 CB + D)) = det(−CB + AD).
Och då −CB + AD = AD − CB har vi visat påståendet.
SF1624 Algebra och geometri
Solutions for Examn 15.03.13
D EL A
1. The plane H is given by the equation 3x − 2y + 5z + 1 = 0.
a) Determine a line N that is perpendicular to H.
(2 p)
b) Determine a line L that does not intersect H.
(2 p)
3
Solution. a) We know that the vector ~n = −2 is orthogonal to H. Consequently any line
5
of the form {P + t · ~n | tal t} is orthogonal to H, for
any point P . For instance, we can
3t
chose P as the origo, and we have that the line −2t (parameter t) is orthogonal to H.
5t
b) We chose two points Q and R in the plane H, and construct the vector ~v = R − Q.
Then any line of the form {P + t~v | tal t} is parallell with the plane H. When we then
chose a point P not in the plane, we get a line that does not interesect it. We chose the
points
−2
−1
Q = −1 and R = 0 ,
1
0
−1
0
that gives ~v = 1 . And we chose the point P = 0. This gives us the line
1
0
−t
{ t | scalars t}.
t
Answer.
2
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
2. Let e~1 , e~2 , e~3 be the standard basis of R3 . The linear map F : R3 → R2 is determined by
1
2
1
F (e~1 ) =
, F (e~2 ) =
och F (e~3 ) =
.
0
−1
1
−3
(a) Determine F (~v ) when ~v = 1 .
(1 p)
1
(b) Determine the dimension of the kernel Ker(F ), and the dimension of the image
Im(F ).
(2 p)
(c) Determine a basis for the kernel Ker(F ).
(1 p)
Solution.
1 2 1
(a) The standard matrix of F is
, so
0 −1 1
−3
0
1 2 1
1
=
.
F (~v ) =
0
0 −1 1
1
(a) We Gauss-Jordan eliminate the standard matrix of F to
1 0 3
A=
.
0 1 −1
Thus the rank of the standard matrix is 2, which also equals the dimension of the
image, dim Im(F ) = 2. The dimension of the kernel is then dim R3 = dim Im(F ) +
dim Ker(F ), that is dim Ker(F ) = 1.
(b) As dim Ker(F ) = 1 we have that any non-zero
vector ~v 6= ~0 such that F (~v ) = 0, will
−3
be a basis. From (a) it follows that { 1 } is a basis.
1
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
3. (a) What is an eigenvector?
(b) Determine which of the following vectors
1
10
1
1
~x =
, ~y =
, ~z =
och w
~=
5
−2
1
−1
1 5
that are eigenvectors for the matrix A =
.
1 5
(c) Determine eigenvalues and their corresponding eigenspaces of the matrix A.
3
(1 p)
(2 p)
(1 p)
Solution.
(a) A vector ~x is an eigenvector for a matrix A means that ~x is non-zero and parallel with
A~x, that is there exists a scalar λ such that A~x = λ~x.
(b) We multiply the vectors with the matrix A, and check wheter they are parallel with
the vectors.
We get
1 5 1
1·1+5·5
26
A~x =
=
=
is not parallel with ~x,
1 5 5
1·1+5·5
26
1 5 10
1 · 10 + 5 · (−2)
0
A~y =
=
=
is parallel with ~y ,
1 5 −2
1 · 10 + 5 · (−2)
0
6
1·1+5·1
1 5 1
is parallel with ~z
=
=
A~z =
6
1·1+5·1
1 5 1
and
1 5
1
1 · 1 + 5 · (−1)
−4
Aw
~=
=
=
is not parallel ~y .
1 5 −1
1 · 1 + 5 · (−1)
−4
We see that ~y and ~z are eigenvectors, whereas ~x are w
~ not.
(c) From the calculations in (a) we see that ~y is an eigenvector with eigenvalue 0 and that
~z is an eigenvector with eigenvalue 6. There are at most two eigenvalues of A, so we
have found them all. Their corresponding eigenspaces are the lines spanned by ~y and
~z.
Answer.
(b) Both ~y and ~z are eigenvectors of A.
(a) The eigenvalue 0 has eigenspace Span{~y } and 6 has eigenspace Span{~z}.
4
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
D EL B
4. In R4 we have, for each number a, the three following vectors
1
2
4
2
a
2
~v1 =
0 , ~v2 = 1 and ~v3 = 3
−1
3
11
.
We let V = Span(~v1 , ~v2 , ~v3 ) denote their linear span.
(a) Determine for which numbers a the vector space V has dimension three.
(b) Let a = 1, and determine a basis for the orthogonal complement V ⊥ .
(2 p)
(2 p)
Solution.
a) The vector space V has dimension three if and only if the vectors ~v1 ,~v2 , ~v3 are linearly
independent. This again is equivalent with the matrix
1 2 4
2 a 2
A=
0 1 3
−1 3 11
having rank three. The rank of the matrix we read off after doing Gauss-Jordan elimination:
1 2
4
1
2
4
1
2
4
1 2 4
3
1
3
2 a 2
∼ 0 1
∼ 0 a − 4 −6 ∼ 0
1
3 0 a − 4 −6 0 0 6 − 3a
0 1 3 0
0 0
0
0
5 15
0
5 15
−1 3 11
The matrix A has rank 3 if and only if 6 − 3a 6= 0, that is a 6= 2. So the vector space
V has dimension 3 if a 6= 2.
x
y
b) The orthogonal complement V ⊥ is all vectors ~u =
z that are orthogonal against
w
the three basis vectors
1
2
4
2
, ~v2 = 1 och ~v3 = 2 .
~v1 =
0
1
3
−1
3
11
That means that ~v1 · ~u = 0, ~v2 · ~u = 0 and ~v3 · ~u = 0 simultaneously. If we write
out the expresseions we get the homogeneous system of linear equations
x + 2y − w = 0
2x + y + z + 3w = 0
4x + 2y + 3z + 11w = 0.
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
Elementary row operations on the augemented matrix of the system gives
1 2 0 −1
1 2 0 −1
1 2 0 −1
1 0 0 −1
2 1 1 3 ∼ 0 −3 1 5 ∼ 0 −3 1 5 ∼ 0 1 0 0
4 2 3 11
0 −6 3 15
0 0 1 5
0 0 1 5
We let w = t, and get that z = −5t, y = 0 and x = t. In other words
1
0
V ⊥ = {t
−5 | scalars t}.
1
1
0
⊥
And it follows that the vector
−5 is a basis of V .
1
Answer.
5
6
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
5. (a) Define what is meant with the coordinate vector of a vector with respect to a basis.
(1 p)
(b) We have the following vectors in R2 :
1
1
~v =
och w
~=
.
2
−1
Determine a basis B for R2 such that the coordinate vector of ~v is w
~ and the coordinate
vector of w
~ is ~v .
(3 p)
Solution. a) Let β = {~e1 , . . . , ~en } be a basis for a vector space V , and let ~x be a vector. Then
the vector ~x can be expressed as
n
X
~x =
ai~ei ,
i=1
for some scalars a1 , . . . , an . The ordered sequence of scalars
a1
a2
~x β =
...
an
is called the coordinate vector of ~x with respect to the basis β.
b) Let {~e, f~} be the sought basis of R2 . The criteria are that ~v = ~e − f~ and that w
~ =
~2 + 2f~. We can write these criteria as
1 −1 ~e
~v
.
=
1 2
w
~
f~
By inverting the 2 × 2-matrix, we read off the relations that
~e
1 2 1 ~v
= ~ .
~
f
3 −1 1 w
In other words we have that
1
2 1
2
1 1
1
~e = ~v + w
~=
+
=
2
−1
1
3
3
3
3
and
1
1
1
1
1
1
0
f~ = − ~v + w
~ =−
+
=
.
2
−1
−1
3
3
3
3
Answer.
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
7
a
c
6. Let ~v =
and ~n =
be two non-zero vectors in R2 , where ac + bd = 0. Let L be
b
d
the linear span of ~v .
(a) Why is β = {~v , ~n} a basis of R2 ?
(1 p)
2
2
(b) Let T : R → R be reflection through L. Determine the matrix representation B of
T with respect to β.
(1 p)
(c) Let P be the change of basis matrix from the standard basis to β. Determine P −1 BP .
(2 p)
Solution.
a) The two vectors form a basis if and only if they are linearly independent. Non-zero
vectors~v and ~n are orthogonal since their scalar product ~v · ~n = ac + bd = 0. This
implies that ~v and ~n form a basis for R2 .
b) The reflection maps the vector~v to~v and ~n to −~n. As T (~v ) = ~v = 1 · ~v+ 0 · ~n and
1
0
T (~n) = −~n = 0 · ~v − 1 · ~n we get that the matrix representation is B =
.
0 −1
a c
c) The matrix Q =
is the change of basis from β to the standard basis. It
b d
d −c
1
−1
follows that P = Q = ad−bc
. Then we get that
−b
a
1
a c
1
0
d −c
−1
P BP =
b d
0 −1 ad − bc −b
a
1
1
a c
d −c
ad + bc
−2ac
=
.
b −a
2bd −bc − ad
ad − bc b d
ad − bc
Note: If b 6= 0 and we substitute d = −ac/b, we can simplify
2
1
a − b2
2ab
−1
P BP = 2
.
2ab b2 − a2
a + b2
c’) Alternatively:
As P −1 BP is the standard matrix, we can compute it directly. Let
x
~u =
be a vector in R2 . We have that
y
~u = projL (~u) + (~u − projL (~u)).
a
This gives that T (~u) = 2 projL (~u) − ~u. The line L is spanned by ~v =
, and we
b
get that
ax + by a
~u · ~v
x
~v − ~u = 2 2
−
T (~u) = 2
2
b
y
~v · ~v
a +b
" 2
# " 2 2
# 2a x+2aby
a −b
2ab
x
x
2 +b2
a2 +b2
a2 +b2
= a 2ab
= 2abx+2b
−
2y
2
2
b
−a
y
y
2
2
a2 +b2
a2 +b2
a +b
8
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
"
It follows that
a2 −b2
a2 +b2
2ab
a2 +b2
2ab
a2 +b2
2
b −a2
a2 +b2
#
and the standard matrix is therefore
"
P
−1
BP =
a2 −b2
a2 +b2
2ab
a2 +b2
2ab
a2 +b2
b2 −a2
a2 +b2
#
.
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
9
D EL C
7. The number sequence {f0 , f1 , f2 , f3 , . . . , } satisfies the following recursive formulae
fn+2 = 2fn+1 + 8fn ,
(∗)
for all integers n ≥ 0. The two first terms in the sequence are known, f0 = a and f1= b.
fn+1
Express fn+1 as a closed formula in a and b. (Tip: Denote by F (n + 1) =
and
fn
write the equation (*) in matrix form).
(4 p)
Solution. We have that F (n + 1) = AF (n), where
2 8
A=
.
1 0
It follows that F (n + 1) = An F (1). If we consider the matrix A as a linear transformation
on R2 , we have that A = P DP −1 where P is the change of basis matrix from a basis of
eigenvectors to the standard basis, and where D is a diagonal matrix with eigenvalues on
the diagonal. We will use this to calculate An .
The characteristic polynomial of A is c(λ) = (λ − 2)λ − 8. The roots are given by
0 = c(λ) = λ2 − 2λ + 1 − 9 = (λ − 1)2 − 9.
In other words λ = −2 and λ = 4. We then determine the corresponding eigenspaces.
2
With λ = −2 the eigenspace is given by the equation x+2y = 0. A basis being ~e =
.
−1
The eigenspace corresponding
to the eigenvalue λ = 4 is given by the equation x−4y = 0.
4
A basis being f~ =
. This gives us the change of basis matrices
1
1 1 −4
2 4
−1
P =
and P =
.
−1 1
6 1 2
We have that
(−2)n 0
A = PD P = P
P −1
0
4n
2n 2 4 (−1)n 0 1 −4
=
0
2n 1 2
6 −1 1
2n−1 (−1)n · 2 4 · 2n 1 −4
=
(−1)n+1
2n
1 2
3
2n−1 (−1)n · 2 + 4 · 2n (−1)n+1 · 8 + 8 · 2n
=
.
(−1)n+1 + 2n
(−1)n · 4 + 2n+1
3
n
n
10
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
We have that F (n + 1) = An F (1), which gives
2n−1 fn+1 =
(−1)n · 2 + 4 · 2n b + (−1)n+1 · 8 + 8 · 2n a
3
n
2
2n+2
= ((−1)n + 2n+1 )b +
((−1)n+1 + 2n )a.
3
3
Answer.
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
11
8. We have the two following figures (Every point is given by coordinates in a usual Cartesian
system).
(11/2,13/2)
(3/2,9/2)
(3,3)
(5,3)
(13/2,9/2)
(6,3)
(0,2)
(4,1)
(4,2)
(2,0) (3,0)
(−3,1)
(a) Determine the matrix of a linear map T : R2 → R2 that transforms the figure on the
left hand side, to the figure on the right.
(2 p)
(b) Determine the area of the figure on the right hand side.
(2 p)
Solution.
(a) We first figure out which points (corners) in the leftmost figure that are mapped to
which point in the
on
We name the following points in the
figure
the
right hand
side.
left figure: p~ := 02 , ~q := 20 and ~r := 30 .
As ~q = 32 ~r and T is linear, we must have T (~q) = 23 T (~r). The only points in the
figure on the
right satisfying
this relation are (4, 2) and (6, 3). Thus we need to send
T (~q) = 42 and T (~r) = 63 . In the left figure p~ is neighbour to ~q, so we need that
T (~p) is neighbourtoT
(~q) and
therefore
we
must
send
T (~p) = −3
1 .
−3
2
4
0
The equations T ( 0 ) = 2 and T ( 2 ) = 1 together determine the matrix of
T as
1 4 −3
.
A=
2 2 1
We check our calculations:
13/2
4
3/2
5
11/2
3
=
.
, A
=
, A
=
A
13/2
1
9/2
3
3
9/2
(b) We can easily compute the area of the leftmost figure by drawing som helpful line
segments.
(3,3)
(5,3)
(0,2)
(4,1)
(2,0)
(3,0)
12
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
The shadowed triangles have areas 3/2 and 1, and the remaining area is 5 + 23 . The
total area of the leftmost figure is then 32 + 1 + 5 + 32 = 9. The determinant of the
matrix A representing the linear map T is (1/2)2 · (4 · 1 − (−3) · 2) = 5/2, so the area
of the rightmost figure is 9 · 25 = 45/2.
SF1624 Algebra och geometri — Solutions for Examn 15.03.13
13
9. If A, B, C and D are quadratic matrices of the same size, we can build the bigger quadratic
block matrix
A B
M=
.
C D
Assume that A is invertible, and that the matrices A and C commute, that is AC = CA.
Show that
(4 p)
det(M ) = det(AD − CB).
(You can freely use the fact that if B or C is the zero-matrix, then we have that det(M ) =
det(AD).)
Solution. Since the matrix A−1 is assumed to exist, we can construct the matrix
I
0
,
−A−1 C I
where I is the identity matrix, and 0 is the zero matrix - both of the same size as A, B, C
och D. The constructed matrix has obviously determinant 1. This means that the matrix
product,
I
0 A B
−A−1 C I C D
has the determinant equal det(M ). When we compute the product we get the matrix
A
B
.
−A−1 CA + C −A−1 CB + D
We now use that CA = AC. The block down to the left then becomes −A−1 CA + C =
−A−1 AC + C = −C + C = 0. We then use that we know that the determinant of matrices
where one block is zero, that is
A
B
) = det(A) det(−A−1 CB + D).
det(
0 −A−1 CB + D
In other words the sougth determinant is det(M ) = det(A) det(−A−1 CB + D). From
the course we have that the determinant preserves product, so
det(A) det(−A−1 CB + D) = det(A(−A−1 CB + D)) = det(−CB + AD).
And as −CB + AD = AD − CB, we have proven the statement.