Relativ rörelse
advertisement

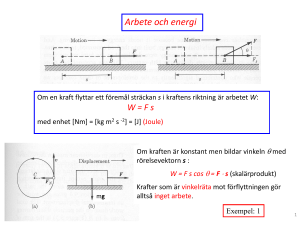
Relativ rörelse 8–1 RELATIV RÖRELSE1 8 8.1 Inledning Den grundläggande lagen i den klassiska mekaniken är Newtons accelerationslag ma = F Som Newton själv noterade finns det en fundamental svårighet gömd i denna ekvation, nämligen det faktum att ekvationen bara kan gälla i vissa koordinatsystem. Detta följer av att accelerationsvektorn a kan ändras när man byter koordinatsystem medan kraftvektorn F förblir densamma. Kraften på en partikel beskriver dess växelverkan med andra partiklar och beror alltså av vilka objekt som finns i omgivningen, men den har inget med valet av koordinatsystem att göra. Observera att vi här talar om vektorerna själva och inte om deras komponenter! Komponenterna av kraftvektorn ändras när vi byter koordinatsystem, men vektorn själv är invariant i den meningen att den har en given storlek och pekar i en bestämd riktning. Accelerationen däremot måste alltid relateras till något visst koordinatsystem fär att vara meningsfull. Exempel: Den gravitationskraft varmed jorden påverkar månen är riktad från månen mot jorden. Newtons accelerationslag säger oss då att månens acceleration likaså är riktad från månen mot jorden. Detta stämmer om vi beskriver månens rörelse i ett koordinatsystem med origo i jordens medelpunkt och axelriktningar betsämda av fixstjärnorna. Om vi däremot väljer ett koordinatsystem med origo i månens medelpunkt blir månens acceleration uppenbarligen noll, fastän gravitationskraften fortfarande finns kvar och fortfarande pekar från månen mot jorden. 1 Detta avsnitt är hämtat från ett kompendium av A. Kihlberg och G. Niklasson De koordinatsystem i vilka Newtons lagar gäller kallar vi inertialsystem. Ett problem som bekymrade Newton och många efter honom är att det inte finns någon grundläggande princip som talar om för oss vilka system som är inertialsystem. Det enda man kan säga är att om man hittat ett inertialsystem så har man hittat dem alla, eftersom två olika inertialsystem bara kan skilja sig åt genom att det ena utför en ren translationsrörelse med konstant hastighet relativt det andra. System som inte är inertialsystem kallar man därför för accelererade koordinatsystem. Frågan om ett visst koordinatsystem är ett inertialsystem eller ej avgörs som alla fysikaliska frågor i sista hand av experiment. Om mätresultaten stämmer med beräkningar baserade på Newtons accelerationslag så är systemet ett inertialsystem, annars inte. Eftersom mätresultat aldrig kan vara exakta och fullständiga kan man aldrig ge ett absolut svar, utan man får nöja sig med att säga att systemet kan betraktas som ett inertialsystem för en viss klass av fenomen eller inom en viss mätnoggrannhet. Exempel: När man studerar hur en bil rör sig längs en väg eller hur en utkastad projektil rör sig genom luften kan man i allmänhet betrakta ett koordinatsystem fixerat i jordytan som ett inertialsystem. Om man noggrannt studerar fallrörelse i lufttomt rum finner man emellertid små avvikelser från accelerationslagens förutsägelser. Mera påtagliga sådana avvikelser visar sig i storskaliga rörelser som strömmarna i värdshaven eller vindarna kring ett lågtryck. Dessa fenomen påverkas märkbart av jordens rotationsrörelse. För att beskriva dem korrekt med hjälp av Newtons mekanik måste vi utgå från ett koordinatsystem fixerat i jordens medelpunkt med axelriktningar bestämda av fixstjärnorna. Vill man Relativ rörelse studera ännu storslagnare fenomen, som t ex planeternas rörelser, duger inte heller detta som inertialsystem, utan man får gå till ett system fixerat i solen. Och så vidare. Man kan fråga sig om det överhuvud taget finns något absolut inertialsystem, i vilket Newtons lagar är exakt giltiga. Frågan är strängt taget meningslös, eftersom vi vet att den klassiska mekaniken av andra skäl har ett begränsat giltighetsområde. Newtons teori kan betraktas som ett gränsfall av mera allmängiltiga teorier som kvantmekanik och allmän relativitetsteori. Särskilt den allmänna relativitetsteorin kastar ett nytt ljus över begreppet inertialsystem. Även om man i princip bör arbeta i ett inertialsystem när man tillämpar Newtons lagar så är det ofta opraktiskt att göra såṀan får t ex en mycket klumpig beskrivning av havsströmmars rörelser om man anger dem relativt ett stjärnfixt system. Funktionen hos en mekanisk apparat i ett svängande och dykande flygplan studerar man lämpligen i ett flygplansfixerat koordinatsystem, fastän det inte är ett inertialsystem. Vi behöver därför en metod att transformera accelerationslagen så att vi direkt kan arbeta i accelererade koordinatsystem utan att varje gång behöva ta omvägen över ett inertialsystem. I detta kapitel skall vi presentera en sådan metod. 8.2 Grundläggande formler och begrepp Låt oss studera rörlesen hos en given partikel i förhållande till två olika koordinatsystem. Det ena koordinatsystemet antages vara ett inertialsystem, medan det andra är ett accelererat system. Partikelns lägevektor relativt inertialsystemet skriver vi som 8–2 tialsystemet, och där x, y och z är koordinaterna. För att beteckna koordinater och lägevektorer i det accelererade koordinatsystemet använder vi grekiska bokstäver. Lägevektorn skrivs alltså som ρ = ξ eξ + η eη + ζ eζ där eξ , eη och eζ är basvektorerna i det accelererade systemet, och ξ, η och ζ är partikelns koordinater i detta system. Om båda koordinatsystemen har samma origo är r och ρ samma vektor. I annat fall gäller sambandet r = ρ+R där R är vektorn från origo O i inertialsystemet till origo Ω i det accelererade systemet. eζ I @ eη H Y HH @ r(t) ρ(t) HH@ HH ez @ 1Q 6 Ω QQ s Q R(t) eξ O ey ex I fortsättningen skall vi använda ordet ‘absolut’ för att beteckna hastighet och acceleration i förhållande till inertialsystemet och ‘relativ’ för att beteckna motsvarande storheter i förhållande till det accelererade systemet. Vår uppgift är att finna sambanden mellan de absoluta och de relativa storheterna. För att göra detta utgår vi från ovanstående samband mellan den absoluta lägevektorn r och den relativa lägevektorn ρ, vilket vi skriver på formen r = ξ eξ + η eη + ζ eζ + R Den absoluta hastigheten v finner vi genom att bilda tidsderivatan av r , varvid vi måste där vi infört beteckningarna ex = î, ey = ta hänsyn till att såväl vektorn R som basvekĵ och ez = k̂ för basvektorerna i iner- torerna eξ , eη och eζ kan vara tidsberoende. r = xex + y ey + z ez Relativ rörelse 8–3 Detta ger v = ξ˙eξ + η̇ eη + ζ̇ eζ + + ξ ėξ + η ėη + ζ ėζ + Ṙ förstå än de två andra bidragen. Den uppträder endast för roterande koordinatsystem, och vi skall senare diskutera dess innebörd utförligare. Bland annat skall vi se att det är coriolisaccelerationen som förklarar varför vindarna kring ett lågtryck och strömmarna i världshaven uppför sig som de gör. För ögonblicket nöjer vi oss med den formella definitionen och skriver alltså den absoluta accelerationen på formen Här representerar de tre första termerna partikelns relativa hastighet v rel, d v s den hastighet en observatör fixerad i det accelererade systemet skulle tillordna partikeln, om han inte vore medveten om att hans koordinatsystem rör sig. De återstående termerna representerar den hastighet partikeln får genom att följa med koordinatsystemet i dess rörelse. Dessa termer bildar tillsammans där medföringshastigheten v med . Vi kan alltså skriva den absoluta hastigheten på formen v = v rel + v med där v rel v med = ξ˙eξ + η̇ eη + ζ˙ eζ = ξ ėξ + η ėη + ζ ėζ + Ṙ a = arel + amed + acor arel amed acor = ξ¨eξ + η̈ eη + ζ̈ eζ = ξëξ + ηëη + ζëζ + R̈ = 2(ξ̇ėξ + η̇ ėη + ζ̇ ėζ ) Newtons accelerationslag, som ju gäller i inertialsystem, får nu formen m(arel + amed + acor ) = F Den absoluta accelerationen a finner vi på Ett annat sätt att skriva samma ekvation är motsvarande sätt genom att derivera v m a p marel = F − mamed − macor tiden och därvid ta hänsyn till tidsberoendet i alla ingående termer. En rättfram uträkning Det första skrivsättet är det ur formell synger resultatet punkt mera naturliga och det som bäst återspeglar filosofin i Newtons mekanik. I a = ξ̈ eξ + η̈ eη + ζ̈ eζ + högerledet står de verkande krafterna och i + 2(ξ̇ėξ + η̇ ėη + ζ̇ ėζ ) + vänsterledet den acceleration de ger upphov + ξëξ + ηëη + ζëζ + R̈ till. Det senare skrivsättet är emellertid ofta i bättre samklang med hur en observatör som där de tre första termerna i analogi följer med det accelererade systemet upplever med motsvarande termer i uttrycket för situationen. En observatör på jorden har t ex hastigheten utgör den relativa accelerationen ingen direkt upplevelse av att hans koordinatarel. De fyra sista termerna kommer en- system rör sig, och när han talar om en parbart av koordinatsystemets rörelse, och de tikels acceleration menar han vanligen bara bildar tillsammans medföringsaccelerationen den relativa accelerationen. Ekvationen ovan amed . I motsats till vad som gällde för visar att man kan räkna med Newtons andra hastigheten finner vi emellertid att accele- lag på vanligt sätt även i ett accelererat koorrationen innehåller ytterligare tre termer, dinatsystem, om man lägger till ett par extra vilka beror av den relativa rörelsen och termer till kraften i högerledet. Man skriver av koordinatsystemets rörelse. Dessa ter- alltså accelerationslagen på formen mer utgör den så kallade coriolisacceleramarel = F + F med + F cor tionen acor, som kanske är lite svårare att Relativ rörelse 8–4 där F med = −mamed F cor = −macor Sådana extra termer kallar vi fiktivkrafter, därför att de inte representerar växelverkan med omgivningen utan egentligen bara är accelerationsbidrag som flyttats över till ‘fel sida’ av ekvationen. Ett exempel som vi skall stöta på är centrifugalkraften, som erhålles som ett specialfall av F med för roterande koordinatsystem. Det är ofta bekvämt att räkna med fiktivkrafter, och trots namnet kan de upplevas som mycket påtagliga, vilket många Lisebergsbesökare kan intyga. Vare sig vi väljer att arbeta med begreppet fiktivkrafter eller inte, måste vi kunna beräkna medföringsaccelerationen och coriolisaccelerationen. I följande avsnitt skall vi studera hur man går tillväga för att göra detta i olika situationer. Exempel: En järnvägsvagn rör sig horisontellt och rätlinjigt med hastigheten v(t). Ställ upp rörelseekvationen för en partikel som glider på ett lutande plan i vagnen! t t - v(t) H H H HH HH Vi väljer koordinatsystem enligt figuren med ξ-axeln längs planet. Under förutsättning att partikeln inte lyfter från planet får den relativa accelerationen formen arel = ξ̈ eξ η 8.3 Koordinatsystem translationsrörelse med H H H HH θ HH HH j ren Vi skall börja med att betrakta den enklaste situationen, nämligen den att axelriktningarna i det accelererade systemet är fixa. Systemet säges då utföra ren translationsrörelse. Eftersom basvektorerna eξ , eη och eζ är konstanta blir alla deras tidsderivator noll. Uttrycket för medföringshastigheten förenklas då till ξ Medföringsaccelerationen kan skrivas R̈ = aex = a(eξ cos θ + eη sin θ) v med = Ṙ vilket helt enkelt är den hastighet varmed origo i det accelererade koordinatsystemet rör sig. På samma sätt reduceras uttrycket för medföringsaccelerationen till amed = R̈ där θ är planets lutningsvinkel och a = v̇(t) är vagnens acceleration. De krafter som verkar på partikeln är tyngdkraften W , normalkraften N och friktionskraften F . Dessa skriver vi på följande sätt: och coriolisaccelerationen försvinner helt och hållet. Accelerationslagen får alltså formen W = mg(eξ sin θ − eη cos θ) N m(arel + R̈) = F = N eη F = −F eξ Relativ rörelse 8–5 blir N negativ, vilket signalerar att partikeln lyfter från planet, såvida den inte är fastklistrad. I det fall att partikeln glider nedför planet gäller att F = f N , där f är friktionstalet. Accelerationen längs planet kan då lösas ur den första av ovanstående ekvationer, vilket ger N HH Y HH F θ ? W ξ¨ = (g − f a) sin θ − (a + f g) cos θ Accelerationslagen blir alltså m(arel + R̈) = W + N + F Vi ser här att ξ¨ blir negativ om vagnens acceleration a har ett tillräckligt stort positivt värde. Det betyder att om partikeln ges en begynnelsehastighet nedför planet kommer dess rörelse att bromsas upp och eventuellt kan den istället börja glida uppåt längs planet. Man kan också genom att sätta ξ̈ = 0 i ovanstående ekvationer studera villkoret för att partikeln skall kunna ligga i jämvikt på planet. Betrakta t ex specialfallet att planet är lodrätt, d v s θ = 90◦ . Jämviktsvillkoren blir då vilket kan skrivas på den alternativa formen marel = W + N + F + F med där F med = −mR̈ Partikelns rörelse på det lutande planet kan alltså beskrivas genom att man utöver tyngdkraften och kontaktkrafterna inför en fiktiv kraft vilken är motriktad vagnens acceleration. N F YH H HH F med Beroende på storlek och tecken hos vagnens acceleration a kan olika situationer inträffa. Vi noterar t ex att om a har ett tillräckligt stort negativt värde = ma N ma ? W m(ξ¨ + a cos θ) = mg sin θ − F N = mg cos θ + ma sin θ N F 6 Efter uppdelning i komponenter längs eξ och eη ger accelerationslagen de två ekvationerna Ur den andra av dessa ekvationer kan normalkraften N lösas: = mg vilka är möjliga att satisfiera under förutsättning att a ≥ g/f . ? W ma sin θ = −mg cos θ + N F 8.4 Koordinatsystem med ren rotationsrörelse Antag att det accelererade koordinatsystemets rörelse består i att det roterar med vinkelhastigheten ω kring en viss axel A. Origo antages vara fixerat och kan få sammanfalla med origo i inertialsystemet. Som exempel kan man tänka på ett koordinatsystem fixerat på en roterande karusell med origo Relativ rörelse 8–6 '$ &% i mittpunkten. Ett annat exempel är ett ko- torn V så att den får tillskottet ∆V . Tidsordinatsystem fixerat i jorden med origo i jor- derivatan av V definieras som dens medelpunkt. dV ∆V = lim ∆t→0 ∆t dt η ξ I @ och man inser att detta blir en vektor som @ tangerar cirkeln och är vinkelrät mot ω och @ω V . I gränsen då ∆t → 0 gäller att Villkoret att origo är fixerat innebär att tidsderivatorna av R försvinner ur uttrycken för hastighet och acceleration. Basvektorerna eξ , eη och eζ är däremot tidsberoende, och vi behöver finna uttryck för deras tidsderivator. För den skull börjar vi med det mera allmänna problemet att finna tidsderivatan av en vektor V , som roterar kring en axel A med vinkelhastigheten ω. Ett bekvämt sätt att matematiskt beskriva rotationsrörelsen är att introducera en rotationsvektor ω, definierad av uttrycket ω = ω eA där eA axeln. |∆V | → |ω∆tV sin θ| och tidsderivatans belopp ges alltså av dV dt = lim ∆V ∆t→0 ∆t = |ωV sin θ| Kombinerar vi detta med ovanstående argument om riktningen hos derivatan finner vi att resultatet kan skrivas som en vektoriell produkt: dV =ω×V dt Detta gäller alltså för varje roterande vektor, inklusive basvektorerna eξ , eη och eζ . Vi kan nu beräkna de olika bidrag till hastigheten och accelerationen som definierär en enhetsvektor längs rotations- ades i avsnitt 1. För medföringshastigheten finner vi t ex med Ṙ = 0: v med ω A eA ∆V i P PP 6 V θ = ξ ėξ + η ėη + ζ ėζ + Ṙ = = ξω × eξ + ηω × eη + ζω × eζ = = ω × (ξ eξ + η eη + ζ eζ ) där termerna inom parentes i sista ledet igenkänns som komponentframställningen av den relativa lägevektorn ρ. Resultatet blir alltså v med = ω × ρ På samma sätt kan vi gå vidare och beräkna Rotationsriktningen, tecknet på vinkel- högre derivator. För andraderivatan av hastigheten ω och riktningen hos eA är basvektorn eξ finner vi t ex relaterade till varandra enligt skruvregeln. dω Rotationsrörelsen innebär att spetsen hos ëξ = × eξ + ω × (ω × eξ ) dt den roterande vektorn V beskriver en cirkel kring rotationsaxeln. Av figuren framgår att där vi tagit hänsyn till att rotationsvekcirkelns radie är V sin θ, där V är beloppet av torn ω kan vara tidsberoende. Såväl vinkelV , och θ är vinkeln mellan vektorerna ω och hastigheten som rotationsaxelns riktning kan V . Under tidsintervallet ∆t vrider sig vek- ändras med tiden. Relativ rörelse 8–7 Det äe nu en enkel sak att beräkna medföringsaccelerationen och coriolisaccelerationen enligt definitionerna i avsnitt 1. Med användning av ovanstående formler finner vi att amed acor dω × ρ + ω × (ω × ρ) dt = 2ω × v rel = Medföringsaccelerationen består som synes av två termer. Ett vanligt specialfall är att rotationsvektorn är konstant, och i så fall överlever endast den sista av dessa. Genom att utföra de vektoriella multiplikationerna finner man att den representerar en acceleration som alltid är riktad in mot rotationsaxeln och har storleken `ω 2 , där ` är det vinkelräta avståndet från rotationsaxeln. Detta bidrag är känt under namnet centripetalaccelerationen. ω ω × (ω × ρ) ρ Av uttrycket för coriolisavvelerationen framgår att den endast uppträder för partiklar som rör sig relativt det roterande systemet. Vidare ser man att coriolisaccelerationen alltid är vinkelrät mot den relativa hastigheten. Exempel: En person som åker karusell har ingen acceleration relativt karusellen. Däremot har han en centripetalacceleration på grund av att han följer med karusellen och alltså rör sig i en cirkulär bana. För att åstadkomma en sådan acceleration krävs enligt Newtons andra lag en kraft som är riktad åt samma håll som accelerationen, d v s in mot centrum. Denna så kallade centripetalkraft utgörs av friktionskraft från underlaget, tryckkraft från en stolsrygg eller något liknande, och den är alltså en påtaglig reell kraft som kommer från kontakten med materiella objekt i omgivningen. Någon annan kraft behöver inte införas. Karusellåkaren vill emellertid gärna beskriva situationen på ett helt annat sätt. Han upplever sig vara påverkad av en utåtriktad centrifugalkraft som uppstår på grund av rotationen och som precis uppväger centripetalkraften så att åkaren förblir i vila relativt karusellen. Som vi förut sett är skillnaden mellan Newtons synsätt och krausellåkarens synsätt egentligen bara att en term, som enligt Newton hör hemma i vänsterledet av ekvationen ma = F . av karusellåkaren omedvetet flyttas över till högersidan av ekvationen och därigenom tolkas som en kraft. Antag att vår karusellåkare kastar iväg en boll eller något annat föremål. När handen har släppt fóremålet påverkas det inte längre av någon annan kraft än tyngdkraften och ett försumbart luftmotstånd. En iakttagare utanför karusellen kommer därför att se föremålet beskriva en kastparabel vars projektion på horisontalplanet är en rät linje. För iakttagaren på den roterande karusellen ser emellertid den räta linjen ut som en spiral, d v s han upplever att föremålets bana hela tiden böjer av åt ena sidan. Det ser alltså ut som om föremålet påverkas av en mystisk sidoriktad kraft. Denna är inget annat än corioliskraften, d v s den tidigare introducerade fiktivkraft som svarar mot coriolisaccelerationen. För att beskriva situationen i mera matematiska termer förenklar vi karusellen till en horisontell vändskiva som roterar Relativ rörelse 8–8 η kring en vertikal axel med den konstanta vinkelhastigheten ω. På skivan finns en partikel med massan m, vars rörelse vi vill undersöka. Om vi inför ett roterande koordinatsystem med ξ-axeln och η-axeln i skivans plan finner vi att η - - ξ En annan tänkbar rörelse är att partikeln rör sig utåt längs ξ-axeln med den konstanta farten vrel relativt skivan, vilket betyder att η = ζ = 0, ξ̇ = vrel och η̇ = 0. Man kan t ex tänka sig att partikeln glider i ett spår på skivan. Den kraft som krävs för att realisera en sådan rörelse ges av ξ ω = ω eζ arel = ξ¨eξ + η̈ eη acor F 6 ρ amed 6 Fξ = ω × (ω × ρ) = −ω 2 ρ = 2ω × v rel = 2ω eξ eη 0 ξ˙ 0 η̇ eζ 1 0 = 2ω(−η̇ eξ + ξ˙eη ) Rörelseekvationerna i komponentform blir således m(ξ¨ − 2ω η̇ − ω 2 ξ) = Fξ m(η̈ + 2ω ξ̇ − ω 2 η) = Fη Dessa kan sedan studeras i olika specialfall. Man kan t ex bestämma den kraft som krävs för att partikeln skall vara i vila relativt skivan, vilket innebär att ξ och η skall vara konstanta. Man finner då Fξ = −mω 2 ξ Fη = −mω 2 η vilket är den centripetalkraft som enligt observatören på karusellen krävs för att kompensera den utåtriktade centrifugalkraften. = −mω 2 ξ Fη = 2mωvrel En observatör som följer med skivan i dess rotation skulle kunna beskriva situationen genom att säga att det krävs dels en kraft in mot centrum för att kompensera centrifugalkraften, dels en kraft åt vänster för att kompensera den åt höger verkande corioliskraften. För en observatör utanför skivan existerar emellertid varken centrifugalkraft eller corioliskraft. Han ser helt enkelt en partikel som rör sig i en spiralformad bana under inverkan av en kraft med komponenterna Fξ och F η enligt ovan. Ett annat intressant specialfall är att partikeln är fritt rörlig på skivan men bromsas av en glidfriktion med friktionstalet f . Friktionskraften är motriktad den relativa hastigheten och ges av uttrycket v rel F = −f mg |v rel| vilket efter komponentuppdelning och insättning i ovanstående rörelseekvationer leder till ett mycket komplicerat Relativ rörelse 8–9 system av differentialekvationer, som vi vilket leder till slutsatsen att a11 = 0. På inte kan lösa analytiskt. samma sätt ser vi att a22 = a33 = 0. Vidare gäller att hur än basvektorerna vrider sig så måste de förbli ortogonala mot varandra. 8.5 Det allmänna fallet Alltså gäller t ex att Rörelsen hos ett godtyckligt koordinatsyseξ · eη = 0 tem består dels i att origo flyttar sig, dels i att koordinataxlarna ändrar riktning. Origos rörelse kan vi alltid beskriva med hjälp vilket efter derivering m a p tiden ger av en translationsvektor R(t). Man frågar ėξ · eη + eξ · ėη = 0 sig om koordinataxlarnas rörelse på liknande sätt alltid kan beskrivas med hjälp av en rotationsvektor ω(t). Svaret är ja, vilket vi nu Insättning av komposantframställningen för skall bevisa. Vi börjar med att konstatera arr ėξ och ėη ger nu sambandet tidsderivatan av en godtycklig vektor själv är a12 = −a21 en vektor, som kan delas upp i komposanter längs basvektorerna eξ , eη och eζ . Alltså kan och på samma sätt vi alltid skriva ez a23 = −a32 6 a31 = −a13 O @ ey @ eζ ex @ eη @ AK @ A @ A R(t) @A R @ AH -ω(t) Ω HHH jeξ ėξ = a11 eξ + a12 eη + a13 eζ ėη = a21 eξ + a22 eη + a23 eζ ėζ = a31 eξ + a32 eη + a33 eζ där koefficienterna a11 , a12 , etc är tills vidare okända storheter. De kan emellertid inte se ut hur som helst, eftersom basvektorerna måste uppfylla vissa villkor. För det första är de enhetsvektorer, vilket t ex innebär att eξ · eξ = 1 Deriverar vi denna likhet m a p tiden finner vi att ėξ · eξ = 0 Endast tre av koefficienterna aij är alltså oberoende av varandra. Vi kan sammansätta dessa till en vektor ω genom definitionen ω = a23 eξ + a31 eη + a12 eζ och vi finner då att ėξ = ω × eξ ėη = ω × eη ėζ = ω × eζ vilket visar att koordinataxlarna utför rotationsrörelse bestämd av vektorn ω. Notera att inget hindrar att koefficienterna aij och därmed rotationsvektorn ω är tidsberoende. Vi kan nu med utgångspunkt från definitionerna i avsnitt 1 skriva ner de allmänna uttrycken för medförningsaccelerationen och coriolisaccelerationen för ett koordinatsystem med godtycklig rörelse: amed acor dω × ρ + ω × (ω × ρ) dt = 2ω × v rel = R̈ + Relativ rörelse 8 – 10 Exempel: Ett tåg passerar en plan, horisontell kurva med radien b och retarderas så att farten varierar enligt sidan av R, och en explicit beräkning ger då v2 amed = −ceξ + eη b Coriolisaccelerationen blir v = v0 − ct där c och v0 är konstanter. Inför ett rörligt koordinatsystem med ζ-axeln vertikalt uppåt och ξ-axeln i tågets rörelseriktning. Bestäm medföringsaccelerationen och coriolisaccelerationen för en partikel i tåget som befinner sig nära origo! acor eξ eη 0 ξ˙ 0 η̇ eζ v v b = 2 (−η̇ eξ +ξ̇ eη ) b ζ̇ För en partikel i fritt fall som endast påverkas av tyngdkraften blir rörelseekvationerna v m(ξ¨ − 2 η̇ − c) = 0 b v ˙ v2 m(η̈ + 2 ξ + ) = 0 b b mζ̈ = −mg O eη = 2 Alternativt kan man skriva de två första ekvationerna som v mξ¨ = m(2 η̇ + c) b v v2 mη̈ = −m(2 ξ˙ + ) b b där termerna i högerledet representerar fiktivkrafter. b 6 - eξ Vi har att v v0 − ct ω = eζ = eζ b b R = −beη v rel = ξ˙eξ + η̇ eη + ζ̇ eζ 8.6 Tillämpning på rörelse relativt jorden Vi skall nu tillämpa den allmänna teorin på ett koordinatsystem som är fixerat i jorden. Låt oss lägga origo på jordytan, ξ-axeln åt För att beräkna medföringsaccelera- öster,, η-axeln åt norr och ζ-axeln vertikal tionen bildar vi först derivatorna av R, uppåt. ω som ju är en roterande vektor: η Ṙ = ω × R I @ ζ dω @ R̈ = × R + ω × (ω × R) dt α R Medföringsaccelerationen kan alltså skrivas O amed = dω × (R + ρ) + ω × [ω × (R + ρ)] dt Eftersom partikeln förutsätts vara nära origo kan vi försumma vektorn ρ vid Relativ rörelse 8 – 11 Rotationsvektorn för koordinatsystemet är densamma som för jorden, d v s den är riktad längs jordaxeln från sydpolen mot nordpolen och har en storlek svarande mot 2π radianer per dygn. Egentligen är rotationsvektorn inte exakt konstant, utan både storlek och riktning fluktuerar en smula, men fluktuationerna är helt försumbara i detta sammanhang. Koordinatsystemets translationsrörelse beskrivs av vektorn R från jordens medelpunkt O till vårt rörliga origo Ω. Medföringsaccelerationen kan alltså skrivas amed = R̈ + ω × (ω × ρ där α är vinkeln mellan jordaxeln och den vertikala ζ-axeln och alltså bestäms av latituden för punkten Ω. Vi finner då att e ξ = 2ω 0 ξ̇ sin α cos α = acor = 2ω × v rel η̇ ζ˙ h i 2ω (ζ̇ sin α − η̇ cos α)eξ + ξ̇ cos αeη − ξ˙ sin αeζ eη eζ Vi kan nu skriva ner accelerationslagen, och vi väljer att ta hänsyn till koordinatsystemets rörelse genom att införa fiktiva krafter i högerledet: marel = F + F med + F cor Vektorn R utför ren rotationsrörelse, och vi finner alltså dess tidsderivator genom up- där prepad vektoriell multiplikation med rotaF med = −mamed = −mR̈ tionsvektorn, vilket leder till F cor = −macor = −2mω × v rel amed = ω × [ω × (R + ρ)] Vid rörelse nära punkten Ω kan vi försumma ρ i jämförelse med R, så att 6 S amed = R̈ = ω × (ω × R) Detta är en centripetalacceleration riktad in mot jordaxeln. Den är störst vid ekvatorn och blir noll vid polerna. - F med W ? ω eη I @ α @ @ @ eζ Låt oss först betrakta en partikel som hänger i en tråd och befinner sig i vila relativt jorden. De krafter som verkar utöver den fiktiva centrigugalkraften F med är kraften S i linan och tyngdkraften W . Vi får alltså jämviktsvillkoret S + W + F med = 0 För att beräkna coriolisaccelerationen vilket visar att linkraften S måste komutgår vi från uttrycken pensera såväl tyngdkraften W som centrifugalkraften F med . I själva verket har vi ingen v rel = ξ˙eξ + η̇ eη + ζ˙ eζ möjlighet att skilja dessa två åt, utan det är deras summa vi normalt mäter när vi väger en ω = ω sin αeη + ω cos αeζ Relativ rörelse 8 – 12 kropp eller bestämmer vertikallinjen med ett lod. Vi sammanför dem därför till en effektiv tyngdkraft W eff = W + F med = W − mR̈ Det är denna effektiva tyngdkraft som definierar den vertikala ζ-riktningen och vi kan därför skriva W eff = −mg eζ där g som vanligt betecknar accelerationen vid fritt fall. Denna varierar något mellan olika punkter på jordytan, främst just för att den innehåller ett bidrag från centrifugalkraften. Det är dock ganska komplicerat att beräkna variationen, eftersom man måste ta hänsyn till att jordens form av samma skäl blir något tillplattad. d 6 S W eff ? Accelerationslagen kan nu skrivas marel = F + W eff + F cor där F stårför alla pålagda krafter utöver tyngdkraften. På komponentform får vi ekvationerna mξ¨ = Fξ − 2mω(ζ̇ sin α − η̇ cos α) mη̈ = Fη − 2mω ξ̇ cos α mζ̈ = Fζ − mg + 2mω ξ˙ cos α Exempel: För att illustrera hur corioliskraften påverkar rörelsen skall vi studera ett enkelt exempel, där alla andra krafter är eliminerade. Betrakta för den skull en partikel som glider på ett glatt horisontalplan. Då gäller mξ¨ = 2mω η̇ cos α mη̈ = −2mω ξ˙ cos α Efter integration m a p tiden ger detta mξ̇ = 2mω(η − η0 ) cos α mη̇ = −2mω(ξ − ξ0 ) cos α där η0 och ξ0 är integrationskonstanter. Genom att eliminera η finner vi sedan ξ¨ + (2ω cos α)2 (ξ − ξ0 ) = 0 Den allmänna lösningen till denna differentialekvation är ξ = ξ0 + R0 cos(2ωt cos α + θ0 ) där R0 och θ0 är integrationskonstanter. Ur ekvationen för η fås vidare η = η0 − R0 sin(2ωt cos α + θ0 ) Vi ser nu att partikeln rör sig i en cirkelformig bana med ekvationen (ξ − ξ0 )2 + (η − η0 )2 = R20 Omloppsriktningen bestäms av tecknet på cos α. Man övertygar sig lätt om att banan genomlöps medurs på norra halvklotet, där cos α > 0. På södra halvklotet gäller motsatsen. Partikeln uppför sig alltså som om den påverkades av en kraft riktad åt höger på norra kalvklotet och åt vänster på södra halvklotet. Detta är naturligtvis inget annat än horisontalkomponenten av corioliskraften. Relativ rörelse η η0 6 '$ &% R @ I @ 0 - ξ0 ξ Banradien R0 beror av partikelns hastighet. Ur ovanstående ekvationer finner vi lätt att 2 vrel = ξ̇ 2 + η̇ 2 = R20 (2ω cos α)2 vilket alltså ger vrel R0 = 2ω cos α Antag t ex att vrel = 10 m/s och cos α = 0.7. Med ω = 2π(24 · 3600)−1 rad/s fås radien R0 = 105 m = 10 mil. För normala hastigheter blir banradien mycket stor, vilket återspeglar att corioliskraften är mycket liten. Den kan trots detta spela en väsentlig roll vid storskaliga rörelser. En blick på en karta över strömmarna i världshaven räcker för att man skall se att de tenderar att cirkulera medurs på norra halvklotet och moturs på södra halvklotet. För vindarna kring ett lågtryck spelar krafter från tryckskillnader en väsentlig roll. 8 – 13