Reglerteknik 1
advertisement

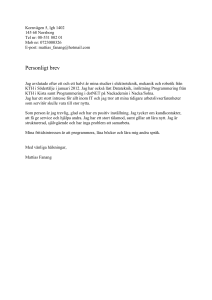
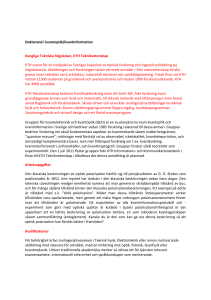
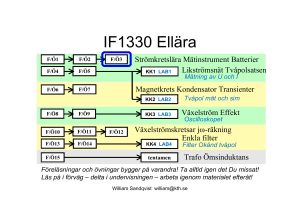
Reglerteknik 1 Kapitel 1, 2, 3, 4 Köp bok och övningshäfte på kårbokhandeln William Sandqvist [email protected] Reglerteknik 1. Givare för yttertemperatur 2, 3. Givare för inomhustemperaturer Behaglig innetemperatur med hjälp av reglerteknik! William Sandqvist [email protected] Reglerteknik = automatiskt, återkopplat system Styrsignaler Regulator Process bostadshus Reglerad temperatur Givare uppmätt temperatur Återkoppling William Sandqvist [email protected] Fördelar med återkoppling • Självkorrigerande • Störningsdämpande • Stabiliserande William Sandqvist [email protected] Reglersystem kan ha två huvuduppgifter • Konstantreglering – kompensera för störningar Regulatorn justerar styrsignalen så att felet försvinner • Följereglering, servosystem – följa börvärdet Regulatorn svänger in styrsignalen mot det nya värdet William Sandqvist [email protected] Exempel på reglersystem Förklara med ord … William Sandqvist [email protected] Exempel på reglersystem Förklara med ord … William Sandqvist [email protected] William Sandqvist [email protected] Ex. Fokusering med ögat William Sandqvist [email protected] Ex. Fokusering i CDspelaren Det är en fyrkvadrant fotodiod som håller laserstrålen fokuserad i CDspelaren. Den fångar också upp datasignalen. Fokus-signal: (A+C) - (B+D) Datasignal: A+B+C+D William Sandqvist [email protected] William Sandqvist [email protected] Blockschema Blockschemat är ett schematiskt och tydligt sätt att beskriva ett reglersystems funktion. Man använder tre symboler: • Signaler • Block • Signaler • Summerings/Differens punkter William Sandqvist [email protected] Blockdiagram, exempel En tank har en variabel inloppstemperatur men man önskar att utloppstemperaturen hålls konstant. William Sandqvist [email protected] Exempel Elspiral William Sandqvist [email protected] Vattentanken (process) P William Sandqvist [email protected] Temperaturgivaren William Sandqvist [email protected] Jämförare Blocket jämförare brukar ritas som differenspunkt William Sandqvist [email protected] Blockschemat William Sandqvist [email protected] William Sandqvist [email protected] Ex. ABS anti lock braking William Sandqvist [email protected] Givare integreras numera ofta i rena verkstadsprodukter Hjullagerenhet med integrerad ABS-sensor. SKF. William Sandqvist [email protected] Induktiv ABS-givare (spole) Det tandade metallhjulet är inbakat i kullagrets plast-tätning! (ex. SKF) William Sandqvist [email protected] William Sandqvist [email protected] Ö 3.1 Linjärt/Olinjärt a) Vilken motor är olinjär? b) Hur stor är den statiska förstärkningen för motor A? c) Hur stor är statiska förstärkningen för motor B? 0 < U < 6 respektive 12 < U < 18 V. A B William Sandqvist [email protected] 3.1 Facit: Linjärt/Olinjärt ∆n 600 − 0 = = ∆U 18 − 0 = 33 [rpm/V] k= k1 = ∆n 250 − 0 = = 42 [rpm/V] 6−0 ∆U k2 = ∆n 700 − 400 = = 17 [rpm/V] ∆U 18 − 12 A B k2 k k1 William Sandqvist [email protected] William Sandqvist [email protected] Statiska och dynamiska egenskaper • Statiskt 75°C 1kW 1kW → 75°C William Sandqvist [email protected] Statiska och dynamiska egenskaper • Dynamiskt 75°C 1kW 1kW → 75°C efter ett tag … William Sandqvist [email protected] Processer och stegsvar • Om börvärdet r är en stegändring får man processtorheten y i form av ett stegsvar. Processen kan ha: • En tidskonstant • Två tidskonstanter • Dödtid • Integration Testsignal: stegändring r • Översväng • Omvänt stegsvar • Instabilitet William Sandqvist [email protected] y Stegsvar – en tidkonstant Varför inte lite ellära … William Sandqvist [email protected] Kommer Du ihåg? Snabbformel för exponentialfunktioner Typ. Stigande kurva x(t ) = 1 − e − t τ Typ. Fallande kurva x(t ) = e − t τ Snabbformel (ger direkt funktionen för en stigande/fallande kurva): x0 = storhetens startvärde t − x∞ = storhetens slutvärde x(t ) = x∞ − ( x∞ − x0 )e τ τ = förloppets tidkonstant William Sandqvist [email protected] Ö 3.2 Tidkonstant Figuren visar stegsvaret för två processer med ”en tidkonstant”. Hur stor är tidkonstanten T för de båda processerna? William Sandqvist [email protected] 3.2 Facit: Tidkonstant 100% 63% 63% T ≈ 25 [ms] T ≈ 1 [s] Tidkonstanten där tangenten skär asymtoten, eller vid 63% av slutvärdet. William Sandqvist [email protected] ”Hela swinget genom resten” Kommer Du ihåg? − t t − x x = X (1 − e ) ⇒ = 1− e τ X X " hela" t = τ ⋅ ln = τ ⋅ ln X −x " resten" τ x t ⇒ ln1 − = − τ X William Sandqvist [email protected] ⇒ t = −τ ⋅ ln X −x X Ö 3.6 Tidkonstant a) För en viss process med ”en tidkonstant” mätte man att det tog 12 sekunder för utsignalen att nå 50% av sitt slutvärde vid en stegformad signaländring. Hur stor är processens tidkonstant? b) För en annan process tog det 10 minuter att nå 90% av slutvärdet. Hur stor var processens tidkonstant? William Sandqvist [email protected] 3.6 Facit: Tidkonstant a) 12 sekunder för 50% T = ? t = T ⋅ ln " hela" 100 − 0 ⇒ 12 = T ⋅ ln " resten" 100 − 50 ⇒ T= 12 = 17,3 [s] ln 2 b) 10 minuter för 90% T = ? t = T ⋅ ln 100 − 0 " hela" ⇒ 10 = T ⋅ ln " resten" 100 − 90 ⇒ T= William Sandqvist [email protected] 10 = 4,34 [min ] ln 10 Två tidkonstanter En tidkonstant för uppvärmningen av glödtråden den andra för uppvärmningen av ungsluften. William Sandqvist [email protected] Dötid Transporttid William Sandqvist [email protected] 3.3 Tidkonstant och dötid Figuren visar stegsvaret för en process med ”dötid och en tidkonstant”. Hur lång är dödtiden och stor är tidkonstanten T ? William Sandqvist [email protected] 3.3 Facit: Tidkonstant och dötid 63% dötid 2s T 2s William Sandqvist [email protected] Integrering William Sandqvist [email protected] Integrerande Servomotorns position x är styrspänningen u tidsintegrerad. William Sandqvist [email protected] Översväng William Sandqvist [email protected] Med ”regulatorn” kan man minimera översvängen! William Sandqvist [email protected] Översväng? En styrd fräsmaskin får inte ha någon översväng! När den till sist når rätt värde är skadan redan skedd! William Sandqvist [email protected] Omvänt stegsvar? William Sandqvist [email protected] Inverterad pendel – instabilt stegsvar William Sandqvist [email protected] William Sandqvist [email protected] Egenskaper som återkoppling och regulator kan förbättra Störningsdämpning • Störningarnas frekvens har betydelse Stabilitet • BIBO = Begränsad Insignal → Begränsad Outsignal Snabbhet • Stigtid tr eller Insvängningstid ts5% Statisk noggrannhet • Kvarvarande fel e efter lång tid är motsatsen till Robusthet • Okänslighet för systemets dynamiska variationer, eller slitage Styrsignalsaktivitet • Tillgänglig styrsignal är oftast begränsad William Sandqvist [email protected] • Störningsundertryckning • Lågfrekventa eller högfrekventa störningar kan undertryckas William Sandqvist [email protected] • Stabilitet ! • Systemets stabilitet kan förbättras William Sandqvist [email protected] • Snabbhet • Stigtid tr • Insvängningstid ts5% • Systemets stigtid eller insvängningstid kan förbättras William Sandqvist [email protected] • Statisk noggrannhet Kvarstående fel! • Statiska noggrannheten efter stegändring kan förbättras William Sandqvist [email protected] • Statisk noggrannhet • Statiska noggrannheten efter börvärdesändring eller störning kan förbättras William Sandqvist [email protected] Begreppet typsiffra • Typ noll hos systemet : Processens signal går mot ett ändligt värde vid en stegformad insignal • Typ ett hos systemet : Processens signal växer oupphörligt vid en stegformad insignal (Senare i kursen) • Typsiffran = antalet integratorer (1/s) i systemets slingförstärkning William Sandqvist [email protected] Typsiffra (öppen krets) Testsignal: stegändring #0 #1 William Sandqvist [email protected] y William Sandqvist [email protected] Några klassiska reglerprinciper • Tvålägesreglering (on/off) • Flerlägesreglering • Proportionell reglering • Integrerande reglering • PI -reglering • Deriverande verkan och PID-reglering • PD-reglering William Sandqvist [email protected] Analog eller digital reglering? Moderna regulatorer använder alltid digital teknik. Reglerteorin kan vara analog eller digital. Kursen innehåller bådadera! William Sandqvist [email protected] Tvålägesreglering on/off ex. Termostat En enkel form av reglering. Ger alltid upphov till svängningar. Ständiga växlingar av styrsignalvärdena kan ge stort mekaniskt slitage av styrutrustningen. William Sandqvist [email protected] Termostatreglering William Sandqvist [email protected] Proportionell reglering u = u0 + K ⋅ e u = u0 normalvärde då felet e = 0. K är förstärkningen, kurvans lutning ∆u/ ∆e. Umax och Umin är regleringens begränsning. William Sandqvist [email protected] Integrerande reglering t 1 u (t ) = ∫ e(t ) dt TI 0 e=0 ex. på integrerad felsignal e=0 u≠0 u=0 William Sandqvist [email protected] PI-reglering t 1 u (t ) = K e(t ) + ∫ e(t ) dt TI 0 PI-regulatorns stegsvar på ett enhetssteg. William Sandqvist [email protected] 4.7 PI-regulator Figuren visar stegsvaret för en PI-regulator. Bestäm förstärkningen K och integrationstiden TI. William Sandqvist [email protected] 4.7 Facit: PI-regulator K = 0,75 t 1 u (t ) = K e(t ) + ∫ e(t ) dt TI 0 2⋅0,75 = 0,75 = TI ≈ 25 [s] William Sandqvist [email protected] Deriverande verkan och PIDreglering d u (t ) = TD e(t ) dt William Sandqvist [email protected] PID-reglering t 1 d u (t ) = K e(t ) + ∫ e(t ) dt + TD e(t ) TI 0 dt D-signalen kan snabba på insvängningsförloppet. William Sandqvist [email protected] Tolkning av PD-reglering d u (t ) = K e(t ) + TD e(t ) dt PD-reglering är som P-reglering men med felsignalen extrapolerad fram med tiden TD. William Sandqvist [email protected] William Sandqvist [email protected] 4.8 PID-regulator Figuren visar felsignalen e in till en PID-regulator. Rita utsignalerna från de tre delarna P, I, och D. William Sandqvist [email protected] 4.8 PID-regulator William Sandqvist [email protected] 4.8 Facit: PID-regulator t 1 d u (t ) = K e(t ) + ∫ e(t ) dt + TD e(t ) TI 0 dt P-delen ger en direkt ”avbild” av felsignalen. D-delen ger ”lutningen” (=differens) av e-signalen (här samma som P-signalen). I-delen integrerar (=ackumulerad summa) e-signalen (här P-signalen). William Sandqvist [email protected] William Sandqvist [email protected] 4.11 Diskussionsfrågor a) b) c) d) e) Höga värden på förstärkningen K leder ofta till dålig stabilitet hos ett reglersystem med P-reglering. Rätt Processer med lång dötid är vanligen svårare att reglera än processer med kort dötid. Rätt Tvålägesreglering används främst i samband med enklare temperaturreglering. Rätt Med hjälp av deriverande verkan kan man ofta eliminera kvarstående fel hos ett reglersystem. Rätt Med hjälp av deriverande verkan kan man ofta förbättra stabiliteten hos ett reglersystem. Rätt William Sandqvist [email protected] Fel Fel Fel Fel Fel 4.11 Diskussionsfrågor f) g) h) i) Integrerande verkan kan aldrig användas ensam, den måste kombineras med andra reglerformer. Rätt En fördel med integrerande verkan är att kvarstående fel vid stegstörning normalt elimineras. Rätt Ju större förstärkning en P-regulator har, desto större blir också det proportionella bandet. Rätt Deriverande verkan bör användas med försiktighet om man har processer med kraftiga mätstörningar. Rätt William Sandqvist [email protected] Fel Fel Fel Fel 4.11 Facit: Diskussionsfrågor a) Rätt b) Rätt c) Rätt d) Fel e) Rätt f) Fel g) Rätt h) Fel i) Rätt William Sandqvist [email protected] William Sandqvist [email protected]