Modellering och reglering av en oktakopter
advertisement

Modellering och reglering
av en oktakopter
Henrik Ohlsson
Hrvoje Corluka
Institutionen för Reglerteknik
Msc Thesis
ISRN LUTFD2/TFRT--5935--SE
ISSN 0280-5316
Department of Automatic Control
Lund University
Box 118
SE-221 00 LUND
Sweden
© 2014 by Henrik Ohlsson, Hrvoje Corluka. All rights reserved.
Printed in Sweden by Media-Tryck
Lund 2014
Abstract
This report deals with the theory and identification out of a multi-rotor
craft, particularly an OktokopterXL from Mikrokopter.de.
A model of the craft is constructed using Matlab Simulink and a
PD controller is designed to control the attitude of the craft. The controller is
auto generated from Matlab to C code which is then interwoven with the multirotor’s source code. The designed controller works well and also the model
corresponds well with reality.
The multirotor platform used is not very developer-friendly with hard to
understand, uncommented code and where the navigation board source code
is not open source. However, the price and performance still make it a
very
interesting platform.
Sammanfattning
Det här examensarbetet behandlar teori för identifiering och reglering av en
multirotorfarkost, närmre bestämt en Octokopter XL från Mikrokopter.de.
En modell av farkosten konstrueras med hjälp av Matlab Simulink och med
hjälp av denna så designas en PD-regulator för att styra attityden av farkosten.
Regulatorn kodgenereras från Matlab till C-kod som sedan integreras med
farkostens källkod. Regulatorn som designas fungerar bra och även modellen visar
sig stämma bra överens med verkligheten.
Plattformen som oktakoptern bygger på är dock inte så utvecklarvänlig med
allmänt svårbegriplig okommenterad kod och där navigationskortets källkod inte
är öppen. Däremot så gör priset och grundprestandan det till en mycket intressant
plattform.
Tack
Vi vill först tacka Jan Ohlsson, Torbjörn Crona och Per Jonsson som gav oss
möjligheten att få detta examensarbete.
Därefter vill vi tacka alla på Guidance, Navigation & Control avdelningen på
Saab Dynamics där vi utfört arbetet, fått hjälp och handledning. Speciellt tack till
Anders Peterson, Stefan Thorstensson, Carl Nordheim, Björn Johansson, Franz
Hoffman, Fredrik Neregård, Henrik Jonsson och Ulla-Mona Mattsson.
Ett stort tack till Karl Erik Årzen som har varit examinator.
Sist men inte minst ett stort tack till Jolon och Tina som har hjälpt oss med
boende, bil med mera när det krisat.
Ordlista
Attityd – farkostens vinklar i luften
Borstlös motor – i en borstlös-motor är permanentmagneten roterande och
spolarna sitter i statorn. Detta innebär att man slipper mekaniskt slitage och oftast
får man även lättare motorer med bättre vridmoment och högre effektivitet.
DIY – Do It Yourself, gör det själv paket
ESC – Electronic Speed Controller
GPS- Global Positioning System
Hovra – sväva över en punkt
Klinometer – mätverktyg för att mäta vinklar
Kvaternion - fyrdimensionellt talsystem definierat av W.R. Hamilton 1843
Innehåll
1. Introduktion ................................................................................................ 1
1.1 Bakgrund............................................................................................... 1
1.2 Syfte/Mål .............................................................................................. 2
1.3 Individuell uppdelning .......................................................................... 2
1.4 Rapportens struktur ............................................................................... 2
2. Teori............................................................................................................ 3
2.1 Representation ...................................................................................... 3
2.2 Multirotorer - flygdynamik ................................................................... 5
2.3 Sensorer .............................................................................................. 10
2.4 PID-regulatorn .................................................................................... 14
3. Oktakoptern .............................................................................................. 15
3.1 Val av plattform .................................................................................. 16
3.2 Plattformen Oktokopter XL ................................................................ 16
3.3 Kretskort ............................................................................................. 17
3.4 Koptertool ........................................................................................... 17
3.5 Sändare, Graupner MC-32 .................................................................. 18
3.6 Simulator AeroSimRC ........................................................................ 18
3.7 Befintlig mjukvara .............................................................................. 18
4. Modellering............................................................................................... 20
4.1 Simulinkmodell ................................................................................... 21
4.2 Insignaler ............................................................................................ 23
4.3 Vinkelregulator ................................................................................... 23
4.4 Hastighetsregulator ............................................................................. 25
4.5 Rotorblock .......................................................................................... 26
4.6 Plottblock ............................................................................................ 27
5. Resultat och analys ................................................................................... 28
5.1 Parameteridentifiering......................................................................... 28
5.2 Jämförelse modell/verklig farkost ....................................................... 31
5.3 Analys av regulatorprestanda .............................................................. 33
5.4 Implementering av autogenererad kod ................................................ 39
5.5 Hastighetsregulatorn ........................................................................... 39
6. Diskussion och slutsats ............................................................................. 42
6.1 Matlab/Simulink ................................................................................. 42
6.2 Jämförelse av flygupplevelse med de olika regulatorerna .................. 42
6.3 Problem ............................................................................................... 43
6.4 Möjligt framtida arbete ....................................................................... 44
6.5 Slutsats ................................................................................................ 45
7. Bibliografi ................................................................................................. 46
1. Introduktion
Examensarbetet ”Styrning och reglering av Oktakopter” har utförts på SAAB
Dynamics GNC (Guidance, Navigation and Control) i Linköping med Lunds
Universitet som ansvarigt lärosäte.
1.1 Bakgrund
SAAB Dynamics system- och styrningsavdelning beslutade sig för att köpa in en
multirotorfarkost för att använda som en exjobbs- och experiment-plattform.
En multirotorfarkost är en farkost med fler än två rotorer. Fler rotorer ger
upphov till ökad stabilitet, robusthet och ökad lyftkapacitet. De vanligast
förekommande är quadrokopter (fyra rotorer), hexakopter (sex rotorer) och
oktakopter (åtta rotorer). Multirotorfarkoster är väldigt populära sedan några år
tillbaka, professionellt används de till att fotografera och spela in video där de är
betydligt billigare och mycket smidigare än att hyra en helikopter för att t.ex. få en
flygvy över ett utomhusevenemang.
Ett annat användningsområde är för att inspektera svåråtkomliga platser och
föremål som till exempel vindkraftverk där man med realtidsbilder från kameran
kan flyga och inspektera vindkraftverket från marken.
Hobbyfantaster är en annan stor användargrupp där man bygger ihop egna
lösningar. Där finns många DIY (Do It Yourself) paket där man utgår från
grundkomponenter och bygger egna ramar och designar egna regulatorer.
Plattformen har flera intressanta delar som tilltalar hemmabyggare då det ses
som en kul utmaning och där man i slutändan bygger ihop en väldigt rolig leksak.
1
1.2 Syfte/Mål
Grundmålet med examensarbetet var att ta fram en Simulinkmodell av farkosten
och en egen regulatordesign. Detta skulle göras genom att först modellera
farkosten i Simulink och sedan autogenerera kod för just styrningsregulatorn till
farkosten.
I Matlab finns det ett kodgenereringspaket och genom att bygga
Simulinkmodellen på ett visst sätt kan man generera C-kod direkt från modellen.
Den genererade koden skulle sedan integreras med befintlig kod och verifieras så
att de modellframtagna parametrarna i regulatorn fungerade även då farkosten
flög. Utvärdering av arbetsmetodiken låg i SAABs intresse för att undersöka om
de i framtiden skulle kunna använda sig av automatgenererad C kod vilket skulle
kunna spara mycket utvecklingstid.
1.3 Individuell uppdelning
Både Hrvoje och Henrik inledde arbetet med litteratursökning och fortsatte sedan
med modellframtagning. Förseningar med leveransen av oktakoptern medförde att
en större uppdelningen inte kunde göras till en början. När farkosten kom byggde
Henrik ihop den, Hrvoje fokuserade på att få all mjukvara som följer med att
fungera. Henrik fokuserade sedan på att förstå den medföljande koden medan
Hrvoje återgick till modellbygge och vinkelregulatordesign. Generellt fokuserade
Hrvoje mer på simulering i Simulink medan Henrik fokuserade på testning i den
verkliga farkosten. Henrik designade hastighetsregulatorn och båda hjälptes åt att
skriva rapporten.
De problem som stöttes på under arbetets gång medförde att vi fick hjälpas åt
väldigt mycket och det underlättade att man var två som kunde hjälpas åt när man
satt fast.
1.4 Rapportens struktur
Rapporten börjar med att beskriva teorin kring multirotorer, sensorer och
regulatorn i kapitel 2. Plattformen och farkosten som användes under detta
examensarbete presenteras i kapitel 3. Kapitel 4 handlar om modellen som togs
fram i Simulink, och regulatorerna som designades med hjälp av modellen.
Resultatet presenteras och analyseras i kapitel 5 och rapporten avslutas med
diskussion och slutsatser i kapitel 6.
2
2. Teori
2.1 Representation
När man beskriver en kropps rörelse och position så gör man det lämpligen
relativt något inertiellt (stillastående). Om det inte finns bestämda definitioner på
olika referenspunkter kan det lätt uppstå missförstånd.
Ett inertiellt koordinatsystem är ett fixt koordinatsystem till vilket en farkosts
position och attityd kan mätas relativt. I flygsammanhang väljs detta system som
ett nord-öst-ned koordinatsystem, där x-axeln pekar positivt mot norr, y-axel pekar
positivt mot öst och z-axeln pekar positivt ner mot jordens mittpunkt. Inertiella
koordinatsystemet
där
är riktningen på
{
} är origo {utryckt i det} kroppsfasta
gravitationen och betecknas
koordinatsystemet
{
} som farkosten representeras med. I detta koordinatsystem är
positiv i farkostens riktning framåt, är positiv i högerriktning och positiv i
riktning nedåt. (Bermes 2010) (Hua, o.a. 2013) (Pounds 2007)
Figur 2.1 En quadrokopters representation
3
Att beskriva en farkosts rotation med avseende på det inertiella
koordinatsystemet kan göras på olika sätt men konventionen inom flyg är
Eulervinklar i roll-, tipp-, och gir-vinklar. Detta görs genom 3 rotationer kring
koordinataxlarna i farkostens koordinatsystem. Genom att först utföra rotationen
runt z-axeln, sedan rotationen runt y-axeln och till sist rotationen kring xaxeln så erhålls Eulervinklarna,
. När dessa transformeras från inertiella till
kroppsfasta koordinatsystemet så kallas de gir( ), tipp( ) och roll ( ). Figur 2.2
illustrerar rotationerna runt de tre axlarna.
Figur 2.2 Gir(ψ), tipp(θ) och roll (ϕ), x är framåt på farkosten
Då en vektor ska transformeras från att vara uttryckt i ett inertiellt
koordinatsystem till ett kroppsfast gäller följande:
där
(
( )
(
( )
( )
4
)
(
)
(2.1)
är produkten av 3 olika rotationsmatriser (en för varje axel)
(2.2)
(
)
)
(2.3)
(
)
(2.4)
(
( )
( )
( )
)
(2.5)
För att gå från det andra hållet, dvs. transformera från det kroppsfasta till det
inertiella koordinatsystemet så inverteras
. I och med att alla tre
rotationsmatriser, (2.2),(2.3),(2.4), är ortonormerade så är även
ortonormerad.
Inversen till en ortonormerad matris är samma som matrisens transponat.
(
)
(
)
Eulervinklar är inte fullständiga, de är odefinierade för
(2.6)
. Detta kan
lösas genom att använda kvaternioner men resultatet med kvaternioner blir
svårtolkat då däremot Eulervinklar är väldigt intuitiva. Inga planer på att göra
loopar med oktakoptern fanns, dvs. inga vinklar nära
så därför användes
Eulervinklar.
2.2 Multirotorer - flygdynamik
En multirotor utgör ett underaktuerat system då den direkt kan styra endast 4 av 6
frihetsgrader. De olika frihetsgraderna illustreras i figur 2.3. Det är möjligt att
styra roll- tipp- och gir-vinklarna samt positionen i höjdled. Det är däremot inte
möjligt att direkt förflytta sig i horisontalplanet.
Figur 2.3 Illustration av de 6 frihetsgraderna
Att styra farkosten i horisontalled utförs genom att ändra attityden (vinkla
farkosten) i roll och tippled. Farkosten hålls hovrande genom att grundgas ges
5
som motverkar gravitationskrafter. Då attityden i roll- och tippled ändras så
kommer acceleration i sidled att genereras av den då vinklade, snett uppåtriktade,
kraften.
Exempel: För att farkosten ska förflytta sig framåt så låter man de 3 främre
rotorerna rotera lite långsammare, de 3 bakre rotera lite snabbare och de 2 på
sidorna vara oförändrade. Detta medför att farkosten vinklas och samtidigt uppstår
en kraft i horisontalled vilket i sin tur leder till förflyttning i horisontalplanet.
Valet att låta de bakre rotorerna rotera snabbare samtidigt som de främre roterar
långsammare görs för att erhålla en snabbare vinkeländring och samtidigt ha
oförändrad kompensering för gravitationskraften. Skulle man låta bara de främre
rotera långsammare skulle man snabbt tappa höjd och om man bara skulle låta de
bakre rotera snabbare skulle man först få en ökning i höjdled följt av att även där
tappa i höjd. När man låter både de främre och de bakre samverka får man ett
snabbare system för att uppnå önskad vinkel, höjdtappet finns kvar men blir inte
lika kraftigt som om man endast minskar rotorerna.
Dynamiken hos en multirotor leder till att det mest naturliga sättet att styra
farkosten är att styra den med 2 spakar som kan röra sig i både x- och y-led.
Exempel: Man låter höger spak motsvara farkostens tipp- och rollvinkel. Förs
spaken framåt så kommer farkosten luta framåt, och rör man spaken i sidled så
kommer den att luta i sidled. Farkosten lutar proportionellt mot spakrörelsen och
rör sig därmed snabbare i horisontalled med ökat utslag. Den andra spaken styr
summan av varvtalet på rotorerna, vilket motsvarar acceleration upp och ner.
Vänster- och högerförskjutning på den spaken motsvarar ändring i girvinkel.
Figur 2.4 Motorerna på farkosten roterar åt olika håll
6
Farkosten modelleras som en stelkropp och flygdynamiken blir ett samband
av den lyftkraft i
varje motor genererar, det luftdrag som bildas från motorerna
i motsatt riktning och tyngdkraften på själva farkosten. För att få balans i
farkostens girmoment roterar motorerna åt olika håll enligt figur 2.4
Figur 2.5 Motorernas rotationshåll och numrering samt
illustration av dragkraftsvektorn Ti, där i är motorns nummer.
Varje rotor bildar en dragkraftsvektor som är riktad uppåt. Vektorns storlek
för varje motor i, där i motsvarar motorns numrering med början på den motor
som är riktad framåt, se figur 2.5, beskrivs enligt formeln:
(2.7)
där
är rotorhastigheten och
är en lyftkonstant som förklaras mer i detalj
senare. (Hossain, Rideout och Krouglicof 2010) (Hamel, o.a. 2002) (Mahony,
Kumar och Corke September 2012 ) (Luukkonen 2011)
Den translationella dynamiken i inertiella koordinatsystemet kan beskrivas
med följande formler
̇
(
)
( )
(2.8)
där
är den totala massan för farkosten,
är farkostens hastighet i inertiella
koordinatsystemet,
är gravitationskonstanten och
är den totala
lyftkraften uppåt från rotorerna. Den första termen är gravitationen som är riktad
7
ned i inertiella koordinatssystemet och den andra termen är den totala lyftkraften
roterad till samma koordinatsystem.
Figur 2.6 Vektorn Qi för varje motor.
Vridmomentet för varje motor motverkas av luftmotståndet i propellern, se
figur 2.6, och kan beskrivas enligt:
(2.9)
där
är en konstant som likt förklaras senare.
För att förändra farkostens attityd varieras varvtalet på motorerna för att på så
vis skapa ett vridmoment runt respektive axel. Styrning i x-led dvs. framåt och
bakåt görs genom att styra vinkeln mot y-axeln, tippvinkeln. Det vridmoment runt
y-axeln som behövs beräknas enligt formeln:
(
)
(
(
)
(
))
(2.10)
(
))
(2.11)
där
är avståndet mellan rotor och fakostens masscentrum Motsvarande
beräkningar utförs för roll, runt x-axeln.
(
8
)
(
(
)
För att uppnå en rotation runt Z-axeln (gir) ökas respektive minskas varvtalet på
de motorer som roterar åt samma håll, detta för att inte påverka den totala
lyftkraften.
(
)
(2.12)
För att generera ytterligare moment i girled och därmed erhålla snabbare svar
på givet kommando är motorerna tiltade 3 grader. De motorer som roterar medurs
åt ett håll och de som roterar moturs åt det andra. Detta gör ett utfört
girkommando mer kraftfullt.
Lyftkraften från varje motor som behövs för att farkosten ska hovra följer
formeln:
√
(2.13)
där
är rotorhastigheten,
farkostens totala vikt, gravitationskonstanten,
antalet rotorer och lyftkonstanten.
För att styra höjden ökas respektive minskas varje motors varvtal. Varje
enskild motors totala bidrag består av upp-, roll- tipp- och gir-bidrag. För att
påverka höjden är det endast upp-bidraget som ändras. Vid hovring är uppbidraget det enda som påverkar och det normala är att börvärdet för upp-nerspaken i neutralt läge är just det som krävs för att farkosten ska hovra.
Eulers rörelseekvation beskriver rotationsaccelerationen av kroppen enligt
̇
(2.14)
}
där är en 3x3 tröghetsmomentsmatris, är vinkelhastighetsvektorn {
och
(
) . Vinkelhastighetsvektorn bestämmer sedan Eulervinklarnas
derivata, för små vinklar gäller att ̇
, ̇
, och ̇
.
Det totala sambandet mellan vridmoment, krafter och rotorhastighet ges av:
9
( )
(
)
(2.15)
(
)
där
är avståndet mellan rotor och farkostens masscentrum samt
är
rotorhastigheten i kvadrat.
Efter omskrivning kan ett samband för önskat varvtal tas fram. I
implementationen skickas däremot inte kommandon för ett varvtal utan en
spänning. Sambandet har därför skrivits om för att motsvara den önskade
spänningen.
( )
(
)
(2.16)
(
)
2.3 Sensorer
Som för de flesta balanserande plattformar så är huvudsensorerna accelerometrar
och gyroskop. På FlightCtrl-kortet så finns tre accelerometrar och tre gyroskop, en
för varje dimension. Regulatorn behöver aktuell vinkel och vinkelhastighet för att
räkna ut styrkommando.
För att mäta detta så används gyroskop och accelerometer. I en ideal värld så
är värdena som läses av från sensorerna helt korrekta utan fel. I verkligheten så är
det inte så utan båda sensorerna har fel och går inte att lita på blint.
10
Accelerometer
En accelerometer mäter acceleration, eller egentligen kraft delat med massa enligt
Newtons formel:
Figur 2.7 Mätning i neutralt läge
I figur 2.7 så mäter accelerometern
gravitationsaccelerationen i y-led.
0
i
x-led
och
den
negativa
Figur 2.8 Mätning vid rotation
I figur 2.8 märks gravitationen i x-axeln och den är något positiv i figuren till
vänster på bilden och något negativ i figuren till höger. Detta gör att man med
hjälp av trigonometri kan räkna ut vinkeln. Värdet för y-axeln är egentligen inte
intressant då den inte ger någon information om vinkeln är positiv eller negativ.
Gyroskop
Gyroskop mäter vinkelhastighet eller rotationshastighet, snurrar man åt ett håll så
ger den ett positivt värde, snurrar man åt andra hållet så ger den ut ett negativt
värde och när farkosten är stilla så ger den värdet 0. Figur 2.9 visar en principskiss
över ett gyroskop som bara ger utslag när den roterar.
11
Figur 2.9 Mätning med gyroskop
Det mest uppenbara är att använda data från accelerometern till att skatta
vinkel- och gyroskopsdata för att skatta vinkelhastighet. Problemet med detta är
att rådata är väldigt brusig och x-axeln mäter av all form av ändring i horisontell
acceleration som ändring på vinkel. Har man en plattform som står horisontellt
och har motorer som får den att accelerera framåt så kan inte accelerometern
urskilja detta från gravitationen. Det finns lite olika sätt att lösa dessa problem,
man kan t.ex. sätta ett lågpassfilter på gyroskopsdata för ta bort brus. Då får man
däremot en fördröjning av vinkelskattningen pga filtreringen, större fördröjning
desto mer man filtrerar och fördröjningar i system leder till ett mer komplext
system.
Ett annat sätt är att bara integrera signalen från gyroskopet för att skatta
vinkeln, men då får man problem med drift. Ett riktigt gyroskop returnerar aldrig 0
när det står still och då kommer detta lilla fel att adderas till vinkeln vilket i sin tur
kommer medföra att skattningen till slut kommer att vara långt ifrån den riktiga
vinkeln.
Kalmanfilter och komplementära filter
Kalmanfilter använder sig av en matematisk modell av systemet. Då man känner
till insignalerna till systemet och mäter utsignalerna med sensorerna så kan man
använda sig av flera mätningar för att skatta tillstånd så som vinkel och
vinkelhastighet. Detta ger en mycket bättre skattning än bara en mätning av en
brusig sensorsignal.
Kalmanfiltret skattar det nya tillståndet med ett viktat medelvärde med hjälp
av den nya sensorsignalen och vad den matematiska modellen tror vinkeln är.
Viktningen räknas fram av kovariansen som är ett mått på hur osäker skattningen
är, om en sensorsignal är väldigt brusig så litar man mer på den matematiska
modellen men om den är mindre brusig så får själva sensorsignalen en större
inverkan på skattningen. Nackdelen med Kalmanfilter är att det är mer komplext
och kräver tyngre matematisk beräkning och ofta är inbyggda system plattformar
processorsvaga vilket gör att beräkningarna kan bli för krävande.
12
Figur 2.10 Illustration av ett komplementärt filter
Ett komplementärt filter använder sig av både informationen från gyroskopet och
accelerometern för att skatta vinkeln. Figur 2.10 visar en illustration av ett
komplementärt filter. Integrering av gyroskopsdata fungerar bra för skatta vinklar
under kort tid, men över längre tid så vet man att gyroskopsskattningen kommer
driva iväg. För att hantera detta använder man accelerometern till att skatta
vinkeln och sedan återställer man gyroskopet genom att förutsätta att
accelerationen är låg.
Enklaste formen på ett komplementärt filter kan se ut på formen nedan
(
)
(
)
(2.17)
där
är en designparameter. Uttrycket inom första parentesen i formeln är
integration av gyroskopsdata tillsammans med föregående vinkel dvs. vad
gyroskopet tror att vinkeln är och
är vad accelerometern tror vinkeln är.
Bidraget från de båda sensorerna viktas sedan till ett skattat värde där man då inte
kommer ha problem med drift och samtidigt kommer ha en bättre vinkelskattning
pga. gyroskopets acceptans av externa krafter till skillnad från accelerometern.
(Colton 2007) (Van de Maele u.d.)
När komplementära filter implementeras testas ofta ifall värdet från
accelerometern är inom rimligt intervall i närheten av gravitationen. Om det inte
är det så använder man bara gyroskopsskattningen för det tidsteget.
Kalman- och komplementära filter är praxis att använda vid sensorfusion.
Kalmanfiltret är rent teoretiskt bättre men lämpar sig inte alltid till inbyggda
system som kan vara processorsvaga. I koden till FlightCtrl kortet så har de inte
13
använt sig av något av de kända sätten utan de har gjort en egendesignad lösning
som fungerar bra.
2.4 PID-regulatorn
PID-regulatorn i dess olika varianter (P,PI,PD etc) är den absolut mest använda
regulatorn i olika sammanhang. Den är enkel att förstå och det finns tumregler för
hur man ska trimma in den.
Namnet PID kommer från regulatorns tre beståndsdelar där P står för
proportionell, I för integrerande och D för deriverande del. På matematisk form
skrivs den enligt nedan:
( )
( )
∫ ( )
( )
(2.18)
( ) beräknas
Här ser reglerfelet
man att styrsignalen
genom
en viktadreglerfelet
summa av
( )), det
aktuella
(börvärde – ärvärde,
ackumulerade
ochdet
det predikterade framtida reglerfelet.
är designparametrar som väljs för
att uppnå önskvärd prestanda och robusthet för systemet. (Hägglund 2008)
Rotationsdynamiken för en multirotor kan enkelt beskrivas som ett andra
ordningens system.
( )
( )
(2.19)
där är aerodynamisk dämpning som oftast är ganska liten. I och med att det är
ett andra ordningens system ska man kunna reglera det med PD-regulator, man har
då 2 designparametrar. (Corke 2011)
Valet av PD-regulator baserades dels på hur den befintliga mjukvarans
uppbyggnad såg ut samt rådgivning med handledare på SAAB. Detta i
kombination med att det i litteraturstudien framkommit att en PID-regulator står
sig bra mot andra typer som en LQ-regulator för denna typ av farkoster
(Bouabdallah, Noth och Siegwart 2004). Eftersom piloten kommer att vara med i
loopen och ta bort stationära fel så visade det sig att en PD-regulator var tillräcklig
för att kunna flyga farkosten i de fall som testades.
14
3. Oktakoptern
MK Okto XL som visas i figur 3.1 är den kraftfullaste multirotorn som
Mikrokopter erbjuder. Detta är den farkost som har modellerats och reglerats. I
detta kapitel beskrivs plattformen och farkosten som användes under
examensarbetet.
Figur 3.1 MK Okto XL
MK Okto XL Specifikationer
•
•
•
•
•
Mått: 73x73x36cm (BxLxH)
Max last:
2500g
Max höjd:
>200 meter
Max distans:
>200 meter
Flygtid:
18-28 minuter
15
3.1 Val av plattform
Efter att ha undersökt olika alternativ på marknaden beställdes en MK Okto XL
från Mikrokopter.de. Detta var den kommersiella multirotorfarkost som hade
högst lyftkapacitet. Lyftkapaciteten gjorde den mest intressant då det finns planer
på att utöka farkosten med fler funktioner såsom att bära laster som kameror etc.
De omdömen som fanns var att det även var en väldigt stabil plattform. Enligt
hemsidan så skulle även det mesta vara öppen källkod vilket skulle göra det enkelt
att modifiera och lägga till egna styr- och navigeringsfunktioner i mjukvaran efter
hand.
3.2 Plattformen Oktokopter XL
Företaget Mikrokopter startades av två tyskar år 2006. Efter ungefär sex månader
hade de lyckats med att skapa en flygande quadrokopter. Utveckling av deras
mjuk- och hårdvara har fortskridit och nu finns det även hexakopter och
oktakopter i deras utbud. Företaget startade som ett hobbyprojekt och har sedan
blivit ett företag där funktioner och även fler farkoster har lagts till efterhand.
Mikrokopters farkoster är kända för att vara väldigt stabila. Det finns flera
andra företag som bygger oktakoptrar och använder sig av Mikrokopters styr- och
navigationskort men en annan ram. Fotografer byter ofta ram till en som är gjord
av kolfiber. Den blir då lite mer modulär och man kan sätta ihop och ta isär
oktakoptern snabbt för att enklare kunna frakta den. Kamerafästen kan köpas till
och monteras på farkosten. Det finns allt från enklare varianter där kameran bara
hänger till mycket mer avancerade med inbyggd stabilisering. SAAB valde att
köpa in en mindre variant som gjorde det möjligt att fästa en systemkamera och
filma under flygning. Kamerafästet har inbyggda funktioner för stabilisering i tipoch roll-led. Stabiliseringen gör att kamerans attityd behålls även om farkostens
attityd ändras.
Oktakoptern består av en ram med 8 stycken aluminiumrör som fästs
samman med hjälp av 2 kolfiberskivor. Längst ut på aluminiumrören sitter 8
stycken borstlösa motorer. Motorerna drivs med hjälp av ett Li-jon batteri och en
ESC som omvandlar batteriets likspänning till en trefasspänning och gör det
möjligt att variera varvtalet på motorerna. På motorerna sitter rotorblad
monterade, under testflygning har en plastvariant använts och vid tyngre last
används en kolfibervariant som ger högre prestanda.
16
3.3 Kretskort
BL Control
BL Control är det tidigare nämnda ESC kort som används för att reglera varvtalen
på motorerna. Kortet är specialdesignat av Mikrokopter för just de motorer som
används i deras farkoster. Källkoden till detta kort är inte öppen.
Flight Control V2.1 ME (FlightCtrl)
Flight Control är huvudkretskortet. Kortet innehåller i
princip alla sensorer och all kod som är nödvändig för att
flyga en multirotorfarkost. Det är även på detta kort som
regulatorn implementeras.
Källkoden till detta kort är öppen och processorn
som gör alla beräkningar är en ATMEGA 1284P. De Figur 3.2 FlightCtrl
sensorer som sitter på kortet är accelerometer, gyro,
kompass och en trycksensor för att mäta höjd.
Navigation Control (NaviCtrl V2.0)
NaviCtrl är ett tillvalskort som har en gps och därmed ger
möjlighet till extrafunktioner för oktakoptern.
Brytpunktnavigering (waypoint navigation) är ett
exempel på funktion som är möjlig med detta kretskort.
På grund av plagiering har Mikrokopter tyvärr valt att
inte göra koden öppen längre.
Figur 3.3 NaviCtrl
3.4 Koptertool
KopterTool är en programvara som används för att läsa av och logga mätvärden i
realtid. Här finns även möjligheter att ändra styrparametrar och kalibrera olika
funktioner som används. KopterTool används även för att installera ny
programvara till de olika kretskorten. Farkosten kommunicerar med en dator via
seriellanslutning eller, då man flyger, via Bluetooth.
17
3.5 Sändare, Graupner MC-32
Sändaren som används är en Graupner MC-32 HoTT, en
påkostad sändare med 16 kanaler som kan tilldelas olika
kommandon. Förutom själva styrningen av farkosten så kan
kanalerna användas till att styra eventuellt kameraställ och
exempelvis använda en av knapparna till att ta bilder med
kameran. Enligt hemsidan till oktakoptern så är denna
Figur 3.4 Sändare
sändare den optimala för att styra farkosten och den var även
väldigt enkel att para ihop med farkosten och få alla
funktioner att fungera.
3.6 Simulator AeroSimRC
Ett simulatorprogram köptes in för möjligheten att öva flygning på dator innan
första riktiga flygturen. Programmet hade en modell av just den inköpta
oktakoptern. Denna kunde styras genom att koppla den inköpta sändaren till
datorn med en medföljande kabel. Detta är smidigt och väldigt lärorikt och det
rekommenderas starkt till alla som ska flyga en multirotorfarkost att, för att
undvika krascher, börja med att flyga i en simulator.
3.7 Befintlig mjukvara
Den befintliga mjukvaran består av ca 7000 rader C kod med tyska variabelnamn.
(Sa, Queensland University of Technology 2011) Tyvärr är koden väldigt dåligt
kommenterad vilket ibland gör den svår att förstå. Speciellt svårt att förstå blir det
då koden inte uppenbart följer teorin rakt av. Allt eftersom plattformen blivit
populärare så har man börjat blanda in engelska också vilket egentligen bara gör
det svårare att leta i koden.
Farkosten styrs av ett antal PID-regulatorvarianter. Tipp och roll regleras av
varsin PID-regulator medan gir regleras av en PI-regulator. Tillståndsestimering
utförs av en egendesignad algoritm som är varken kalmanfilter eller
komplementärt filter. En forskargrupp i Australien har gått igenom koden och
kommit fram till att tillståndsestimeringen inte liknar något de sett tidigare men
det fungerar och farkosten flyger bra. (Sa och Corke, Estimation and Control for
an Open-Source Quadcopter 2011)
En styrka med plattformen är att de flesta parametrarna enkelt går att justera,
så som exempelvis PID parametrarna, via programmet KopterTool. Nackdelen är
18
att deras PID parametrar har visat sig inte vara klassiska PID-parametrar utan
snarare en egendesignad variant där de bytt namn på de olika delarna.
Om man fäster en kamera eller annan last på farkosten så ändras dess
flygegenskaper, men eftersom man enkelt kan ändra många parametrar gör det att
man kan testa sig fram till vilka inställningar som passar ens egna flygpreferenser
bäst. Alla ändringar görs genom det medföljande programmet KopterTool som har
ett enkelt och användbart GUI.
Navigationskortet tillför en mängd funktioner som underlättar flygningen.
Några av dessa är:
• altitude hold, vilken innebär att farkosten håller angiven höjd
automatiskt.
• position hold som gör att farkosten håller sig kvar på en och samma
position.
• coming home vilken piloten kan aktivera när han vill att farkosten
automatiskt ska flyga tillbaka till sin startplats. Denna funktion
aktiveras även om man skulle tappa kontakten mellan farkost och
sändare.
• Brytpunktnavigering inom en viss radie.
En mängd parametrar kan ställas in så som på vilken höjd farkosten ska flyga
till startplatsen, max- och min-varvtal och egna PID-värden, alla för autonom
flygning. Problemet med navigationskortet är att all kod är stängd och det inte går
att använda informationen från dess GPS till att utveckla egna funktioner.
19
4. Modellering
En bra modell av farkosten är baserad på bra kunskap om den teori som är aktuell
och i så noga specifikationer av farkosten som möjligt.
När modellen skulle påbörjas erhölls ett par delar av SAAB, airframe och
dess initieringskod. En stor del av tiden ägnades åt att förstå alla de delar som
erhölls för att på bästa sätt kunna utveckla bra kompatibla block.
Till en början gjordes en modell i Simulink baserad på allmän teori om
multirotorfarkoster. Detta kom senare att anpassas för att uppnå en bättre
beskrivning av den verkliga farkosten. Fokus lades enbart på stelkroppsdynamiken
och inte aerodynamiken då SAAB under många år redan tagit fram en väldigt bra
modell för den.
I Simulink utvecklades en vinkelregulator samt en hastighetsregulator. Att
styra en multirotorfarkost med hjälp av att reglera dess Euler-vinklar är det
vanligaste sättet och det krävs inte heller någon positionsdata för att fungera.
Insignaler på önskad vinkel, som motsvarar användarens kommandon från
sändaren, jämförs med den aktuella vinkeln. Vinkelregulatorn kaskadkopplas
sedan med en hastighetsregulator. Hastighetsregulatorn var ett önskemål från
SAAB och är i sin tur beroende av just hastighetsdata. I hastighetsregulatorn
representerar insignalerna istället önskad hastighet i x- och y-led och därefter
beräknas en vinkel för att farkosten ska hålla angiven hastighet.
Regulatorblocken anpassades för autogenerering av C-kod. Det gjordes
genom att enbart det mest väsentliga ligger i blocken samt att in- och utsignaler är
anpassade för att enkelt fungera med den befintliga koden.
20
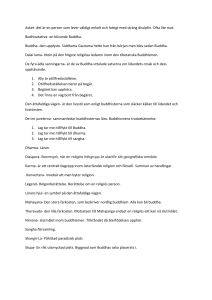
4.1 Simulinkmodell
I figur 4.1 och 4.2 visas en översikt av simulinkmodellen där de enskilda blocken
beskrivs i senare avsnitt. Via manuella switchar så kan man växla mellan olika
typer av insignaler (signalgenerator, loggdata, joystick) och även mellan teoretiska
utsignaler eller signaler anpassade för den aktuella mjukvaran.
21
Figur 4.1 Överblick av simulinkmodell
22
Figur 4.2 Overblick av regulator delen "Controller"
4.2 Insignaler
För att representera användarens styrkommandon används ett par olika alternativ.
Vid test av enklare signaler används signalgeneratorn och för jämförelse med
tidigare gjorda testflygningar används Matlabs from workspace där styrsignalerna
är importerade ifrån testflygningarnas loggar. Det finns även en möjlighet att
använda en joystick som insignal och då kan modellen flygas i Matlab med till
exempel en Xbox-kontroll. För modell med enbart vinkelregulator motsvarar
signalerna önskad vinkel för farkosten medan styrsignalerna för modell då även
hastighetsregulatorn är inkopplad motsvarar önskad hastighet.
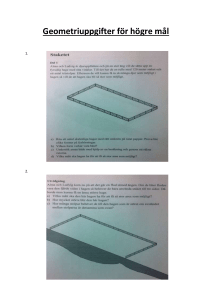
4.3 Vinkelregulator
Figur 4.3 Vinkelregulatorblockets innehåll
23
Vinkelregulatorn reglerar farkosten till önskad vinkel, det vill säga att en
förändring på spaken är proportionell mot den vinkel man önskar för farkosten.
För att uppnå den önskade vinkeln beräknas först ett önskat vridmoment i x-,
y- och z-led ut. Via ytterligare matrisberäkningar erhålls ett önskat varvtal på varje
enskild motor. En förändring av vinkeln leder till en hastighet i xy-planet.
För gir är det lämpligare att låta spaken på kontrollen styra en vinkelhastighet i gir-led. Ifall den skulle styra en vinkel så skulle farkosten återvända till
sin ursprungsvinkel så fort man släppte spaken till sitt nolläge. Detta är normalt
inte det man vill ska ske när man flyger, utan då vill man att farkosten ska behålla
sin gir-riktning när man släpper på spaken.
Vid användning av endast vinkelregulator kommer farkosten fortfarande ha
en avklingande hastighet i sida när den önskade vinkeln återställs till neutral
position och för att få farkosten att snabbt stanna måste användaren själv
kompensera för detta.
Regulatorn använder sig av aktuell vinkel och jämför med den önskade och
vinkeln regleras sedan med hjälp av en PD-regulator. Insignaler till regulatorn är
önskade vinklar, aktuella vinklar och aktuella vinkelhastigheter.
En allmän beräkning av vridmomentet för tipp-vinkeln med en PD-regulator
ges av
(
)
(
)
(4.1)
där
och
är designparametrar,
är den önskade vinkeln,
den aktuella
vinkeln,
önskad vinkelhastighet och aktuell vinkelhastighet. Eftersom målet
är att hålla en önskad vinkel är den önskade vinkelhastigheten 0 och därför är
Motsvarande görs för roll-vinkeln och för gir används en D-regulator för att
erhålla en hastighet i gir-led, dvs
(
)
med
som designparameter,
önskad vinkelhastighet och
vinkelhastighet. Figur 4.3 visar vinkelregulatorblocket från Simulink.
24
(4.2)
aktuell
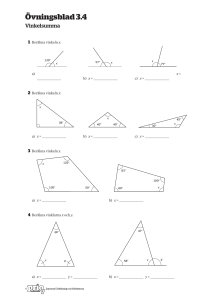
4.4 Hastighetsregulator
Figur 4.4 Hastighetsregulatorblockets innehåll
Målet med hastighetsregulatorn är att en viss position på spaken ska motsvara en
viss hastighet i xy-led. Insignaler är önskad hastighet i x- och y-led (sett till
farkosten) och med hjälp av en P-regulator beräknas en önskad tipp- och
rollvinkel. Den stora fördelen med en hastighetsregulator är att den automatiskt
stannar när man släpper spaken till nolläget. För att denna ska fungera krävs det
att man har tillgång till GPS-data med aktuella hastigheter.
Den önskade tipp-vinkeln beräknas enligt:
(
)
(4.3)
där
är designparameter,
den önskade hastigheten i x-led och
är den
aktuella hastigheten i x-led. Motsvarande beräkning görs för rollvinkel, då med
hastigheter i y-led. Figur 4.4 visar hastighetsregulatorblocket från
simulinkmodellen.
25
4.5 Rotorblock
Figur 4.5 Rotorblockets insida
Modellen följde till en början teorin och använde sig av varvtal. Då varvtalen inte
kunde identifieras så har modellen anpassats till att hantera en spänning istället.
Grunden är densamma med skillnaden att det som modellen tror är varvtal istället
är ett värde på spänningen för ett visst varvtal. Rotorblocket är en modell av
motorerna med hänsyn till deras maxhastighet och tidskonstant, därefter beräknas
kraft och moment. I airframe utförs de teoretiska beräkningarna för luftdynamiken
och aktuella Eulervinklar samt hastigheter avläses. Den för regulatorn intressanta
mätdata återkopplas till modellen och delar av den skickas även till ett plottblock.
Motorerna antogs vara ett andra ordningens system
( )
(4.4)
där parametern
trimmades in mot verklig flygdata. Figur 4.5 visar
rotorblockets implementation i Simulink.
26
4.6 Plottblock
Peter Corke har till sin bok (Corke 2011) en medföljande simulinkmodell där han
även använder en av honom framtagen 3D-realtidsplott. Detta ansågs mycket
hjälpsamt vid simuleringar både för egen del och framförallt för mindre insatta
personer. Koden modifierades därför för att passa vår modell och farkost. Figur
4.6 visar hur 3D-realtidsplotten ser ut när man simulerar.
Figur 4.6 3D-realtidsplott ifrån simulering i Simulink
27
5. Resultat och analys
Här följer analys av resultaten från modellering och flygningar. De regulatorer
som tagits fram och hur bra de fungerar diskuteras samt hur utförandet av
parameteridentifiering utfördes.
5.1 Parameteridentifiering
För både accelerometrar och gyron finns det flera möjliga felkällor. Det kan vara
att de inte är placerade exakt ortogonalt mot varandra eller ett skalfaktorfel. De
flesta signaler filtreras av Mikrokopter själva, men för att säkerhetsställa de
signaler som används identifierades dessa och eventuella felkällor.
Att identifiera vinkelparametern gjordes genom att använda en klinometer.
Den fästes på fram- respektive sidoarm av farkosten och sedan lästes de erhållna
värdena av i steg om 5 grader. Utifrån testet kunde, upp till en lutning på 65
grader, en faktor tio avläsas. Figur 5.1 och 5.2 visar plottar över vinkelskattningen.
För att inte riskera att vinkla farkosten för mycket valdes en begränsning av
börvärdet till 1 radian (ca 57 grader) och därmed gjordes inga ytterligare
mätningar. Beräkning av skalningsfaktorn på vinkelhastigheten gjordes med
loggvärden ifrån flygningar och egna testfall där farkostens attityd ändrades med
konstant vinkelhastighet. Graferna avgränsades till de områden där konstant
vinkelhastighet kunde avskiljas och ett medelvärde av vinkelhastigheten
beräknades. Vid konstant vinkelhastighet så deriverades vinkelplotten för samma
tidpunkt och på grund av att vinklarna där är kända så kunde vinkelhastigheten
beräknas. Detta gav oss en skalfaktor på ca 18,3.
28
Figur 5.1 Resultat av klinometer mätningar för tipp
Figur 5.2 Resultat av klinometer mätningar för roll
29
En ideal rotors dragkraft och vridmoment har ett kvadratiskt samband:
(5.1)
(5.2)
(5.3)
(5.4)
där
och
båda beror på luftens densitet, propellrarnas dynamik och
konstanterna
och
. Dessa konstanter är enhetslösa och kan bestämmas med
propellerns vingprofildata. Deras relation är
(5.5)
√
Då det inte fanns tillgång till vingprofilsdata så gjordes en skattning av som
baserades på värden då farkosten hovrade. Enligt formeln för lyftkraften (2.13)
kan vid hovring allt utom identifieras och därmed kan beräknas. Det går nu att
härleda
vilket gör det möjligt att med (5.4) och (5.5) beräkna
och .
(5.6)
En första skattning av tröghetsmomentet utfördes med ett Matlabscript. I
figur 5.3 visas resultatet för beräknat masscentrum för farkosten, den röda
punkten. För att göra beräkningen approximerades viktfördelningen av farkosten
med punktmassor, de blå punkterna. Dessa användes sedan till att räkna ut
masscentrum och därefter tröghetsmomentet. Axlarna visar avstånd i meter.
I 5.7 ser vi den tröghetsmatris som erhölls:
(
)
(
)
30
Figur 5.3 Graf ifrån tröghetsmomentsberäkning
(5.7)
5.2 Jämförelse modell/verklig farkost
För att jämföra hur modellen avspeglar den riktiga farkosten användes loggar från
testflygningar. De första försöken gav väldigt dåliga resultat både beroende på att
modellen inte var så bra som förväntat och att de skalningar som fanns i C-koden
inte hade identifierats tillräckligt bra. När farkosten flög första gången med
egenframtagen regulator gav det mycket information, den flög inte speciellt bra
och var knappt kontrollerbar men det gav mycket nyttig data.
De loggade styrsignalerna från flygningen matades in som styrsignal i
modellen med samma regulator som användes i testflygningen. Av detta kunde
man då se att den modell som tagits fram inte överensstämde helt med
verkligheten.
I figurerna i resten av detta kapitel visas börvärde mot ärvärde. För att
jämföra hur modellen skiljer sig mot verkligheten jämförs graferna från modellen
med grafer utifrån de loggade värdena.
Den data som loggas ger ut 10 värden per sekund. Eftersom att modellen är
tidskontinuerlig och värdena mäts betydligt snabbare än 10Hz i verkligheten
interpoleras dessa värden innan de används som insignaler i modellen. Efter att
modellparametrar justerats erhölls en modell som stämde väl överens med
verkligheten. Störst förändringar var justering av tröghetsmomentet, tyngdpunkt
och modell för rotorerna.
Efter att modellen finjusterats så kunde en ny regulator trimmas in och den
regulatorn som trimmades in efter ett par försök fungerade riktigt bra även i
verkligheten. Värdena på och
är 194 och -37.
31
Figur 5.4 Resultat ifrån verklig data
Figur 5.5 Resultat ifrån simulering med felaktig modell
Figur 5.6 Resultat ifrån simulering med den slutgiltiga modellen
32
Första grafen, figur 5.4, visar att den verkliga flygningen har periodiska
svängningar i stegsvaret som är mellan sekund 2 till 7. Vid samma intervall i figur
5.5, så hade första modellen inget av detta. När modellen sen ska gå tillbaka till
sitt ursprungsläge så är inte överslängen och stationära felet lika stora som i
verkligheten. Man kan också se att den första modellen har en längre dödtid vid
första stegsvaret än i verkligheten. Tittar man däremot på den korrigerade
modellen i grafen, figur 5.6 ser man den periodiska svängningen med i princip
samma periodtid, det stationära felet överensstämmer lite bättre med den verkliga
flygningen och även dödtiden stämmer bättre.
En sak som kan tyckas konstig är att stationära läget inte är 0 grader utan att
den har en liten offset. Detta beror på att gyroskopen kalibreras varje gång man
startar med ett nytt batteri och då lutar marken oftast lite. Det felaktiga nolläget
kompenseras av användaren när man startat genom att justera bort offseten med
fasta styrsignaler så att den står still och hovrar då spakarna är i neutralt läge. Det
betyder att man i nolläget har en liten styrsignal hela tiden för att justera bort den
lilla initiala lutningen.
5.3 Analys av regulatorprestanda
Graferna nedan figur 5.7 – 5.10 representerar en vanlig flygning, graferna visar
tipp och roll vinklar för både en verklig (figur 5.8, 5.10) och simulerad flygning
(figur 5.7, 5.9). Graferna visar att modellen är ganska bra och stämmer väl överens
med verkligheten. Svagheten i modellen ligger i när man tippar och rollar
samtidigt som t.ex. vid intervallet 45-50 sekunder. I det intervallet ser man att
simuleringen skiljer sig en del från den verkliga flygningen. Simuleringen är bättre
och följer börvärde bättre än vad som sker i verkligheten just när man tippar och
rollar samtidigt, medan bör- och ärvärde överensstämmer väldigt bra för de
delarna när man utför roll- eller tippändringar separat.
33
Figur 5.7 Simulering av vanlig flygning för tippvinkel
Figur 5.8 Plott av vanlig flygning från verklig data för tippvinkel
34
Figur 5.9 Simulering av vanlig flygning för rollvinkel
Figur 5.10 Plott av vanlig flygning från verklig data för rollvinkel
35
Laststörning
Figur 5.11 Graf av tippvinkel under en flygning med laststörningar
Figur 5.12 Graf av rollvinkel för en flygning med laststörningar
Graferna i figur 5.11 och 5.12 visar tipp- och rollvinklarna när farkosten utsätts för
laststörningar. Dagen då testerna utfördes blåste det en del sidvind så man ser en
offset också pga. kompensation för vinden. Laststörningarna inducerades genom
att fästa ett snöre i koptern och sen dra i det flera gånger då koptern hovrade. Man
ser störningarna mellan i intervallen vid ca 30-45s och 60-70s, snöret rycktes hårt
36
men trots det så vinklades farkosten som max ca 17 grader. Den hade inga
problem att kompensera för det och kändes aldrig instabil under den perioden.
Graferna i figur 5.13 och 5.14 visar simuleringen av samma data som vid
laststörningen utan att införa laststörningar i modellen. Genom att jämför graferna
med figur 5.11 och 5.12 så kan man lättare se när farkosten utsattes för
laststörningar.
Figur 5.13 Simulering av tippvinkel från laststörningsflygning
Figur 5.14 Simulering av rollvinkel från laststörningsflygning
37
Modellfel
I figur 5.15 och 5.16 har ett modellfel inducerat genom att fästa en vattenflaska på
ca 0.5kg på farkostens ena landningsben. Detta flyttar tyngdpunkten på farkosten i
och med att flaskan inte är i mitten under farkosten. Det blir en sned belastning på
farkosten men regulatorn klarade det utan problem. Under flygningen så var det
knappt märkbart att flaskan var påkopplad.
Figur 5.15 Graf över rollvinkeln under flygning med flaska
Figur 5.16 Graf över tippvinkeln under flygning med flaska
Av resultatet kan man se att vinkelregulatorn ger mycket goda resultat och även
när extremfall testas så är resultaten bra.
38
Den framtagna regulatorn är snabbare och det känns även vid styrning av
oktakoptern då den uppnår börvärde snabbare och samtidigt även känns aningen
stelare än den ursprungliga.
5.4 Implementering av autogenererad kod
Den autogenererade koden skapar ett antal nya c-filer. I ordinarie kod utförs
hänvisning till dessa genom variabeldefinitioner. De aktuella signalerna mappas
till de signaler som de autogenererade filerna använder. Efter det exekveras
huvudfunktionen i den autogenererade koden och när den har körts så mappas de
styrsignaler som beräknats till de aktuella styrsignalerna för farkosten.
Integreringen mellan befintlig kod och egen kod resulterade inte i någon
märkbar ökning av beräkningstid och den ordinarie koden för styrsignalen körs
parallellt för möjligheten till jämförelse.
5.5 Hastighetsregulatorn
När det framkom att det saknades åtkomst till GPS-data togs beslutet att inte
vidareutveckla hastighetsregulatorn. Den regulator som tagits fram i Simulink är
förberedd för autogenerering och fungerar bra i modellen. I figur 5.17 och 5.18 ser
man hur en önskad hastighet i tipp- respektive roll-led regleras med hjälp av en
beräknad vinkel för tipp respektive roll. Man ser att regulatorn automatiskt
korrigerar med en vinkling åt motsatt håll när hatighetskommandot är 0 för att få
stopp på farkosten.
39
Figur 5.17 Hastighetsregulator med önskad hastighet i tipp-led samt det tippkommando som vinkelregulatorn erhåller.
40
Figur 5.18 Hastighetsregulator önskad hastighet i tipp-led samt det tippkommando som vinkelregulatorn erhåller.
41
6. Diskussion och slutsats
I detta kapitel diskuteras resultat, lärdomar och förslag på fortsatt arbete.
6.1 Matlab/Simulink
Att ta fram regulatorer som fungerade tillräckligt bra tog inte så lång tid utan den
mesta tiden gick åt till att få alla block att verkligen fungera enligt teorin.
Efter att allt såg ut att stämma så kunde mer tid läggas på att optimera
regulatorerna för att uppnå de mål som var satta, att uppnå liknande eller bättre
reglering jämfört med de regulatorer som redan fanns i farkosten.
Koden för Mikrokopters egen regulator var väldigt rörig och det var svårt att
förstå hur den fungerade/var designad. Detta medförde att vi själva inte lyckades
implementera deras regulator i Matlab modellen. Hade detta varit möjligt för oss
så hade det varit betydligt enklare att trimma in modellen direkt mot verklig data.
Ifrån de första testflygningarna med vår regulator erhöll vi väldigt nyttig
flygdata. Nu hade vi loggar från en verklig flygning med en helt känd regulator, så
då var det bara till att jämföra denna med hur modellen betedde sig.
6.2
Jämförelse av flygupplevelse med de olika
regulatorerna
Den regulator som medföljer har optimerats efter många år av finjustering och
fungerar riktigt bra. För att säkerställa om vår regulator fungerade överhuvudtaget
vid de första försöken tränades flygkunskapen upp med den befintliga koden.
Detta för att vår brist på flygrutin inte skulle påverka flygningen utan att vi enkelt
skulle kunna känna skillnaden på hur farkosten agerade i luften med vår regulator
jämfört med originalet.
Med den regulator som togs fram upplevs en skillnad jämfört med originalet
där den framtagna regulatorn även den är enkel att flyga med och farkosten svarar
bra mot de börvärden som skickas. Skillnaden ligger framförallt i aggressivitet.
Den framtagna regulatorn är lite mer aggressiv, medan originalet upplevs som
42
långsammare och mjukare. Detta är helt enkelt bara två olika regulatorer och
vilken som föredras beror helt på användarens preferenser och på det flyguppdrag
som ska utföras.
6.3 Problem
Det största problemet som stöttes på under arbetets gång var att källkoden inte var
så öppen som förväntat. I princip all kod är även skriven på tyskinfluerad form
och även okommenterad, vilket gjorde att det gick åt en hel del tid till att förstå
hur allt var sammankopplat.
Just navigeringslösningen låg planerad en bit in i projektet vilket medförde
att upptäckten att delar av GPS-koden inte var tillgänglig kom sent i projektet.
Detta ledde till begränsningar i tänkt implementation och då det inte fanns tid, och
heller inte innefattades av projektet, att skriva all gps-kod på egen hand, som
annars hade varit en möjlig lösning. Utifrån de förutsättningarna fattades beslut
om att inte implementera hastighetsregulatorn i verkliga farkosten men istället att
undersöka och beställa ett annat gps-kort som skulle kunna fungera för framtiden.
Resultatet blev att ett NGUAVP-kort beställdes och möjlighet för gpsfunktioner
nu finns för framtida projekt.
Förseningar av leveransen
Det var flera olika saker som bidrog till förseningar. Ett av problemen var att det
uppkom en hel del komplikationer vid leverans av den beställda oktakoptern. Det
ledde i sin tur till att projektet blev haltande redan i starten.
Till en början kunde all tid ägnas åt inläsning av teori angående multirotorer
och modellering, vilket var positivt, men endast möjligt till en viss gräns. Till slut
behövs den faktiska farkosten och uteblivandet av den var kännbart. Utan att ha
den faktiska hårdvaran var det svårt att sätta sig in i hur allt hängde ihop.
Bakgrund C-kod, utbildning
Arbetet visade sig kräva mycket mer C-programmering än vad som från början var
förväntat. Ingen av oss hade någon bakgrund i C utan den programmering som vi
hade med oss ifrån utbildningen var i princip enbart JAVA.
I efterhand har vi kommit fram till att det förmodligen hade varit mer
gynnsamt för projektet om inte båda exjobbarna haft främst reglerutbildning utan
istället att en hade haft inriktning mot reglerteknik och en inriktning mot
programmering, gärna med erfarenhet från C och inbyggda system.
43
Bristande information från Mikrokopter
Projektet blev stillastående ett par gånger då information för vissa viktiga metoder
inte gick att få fram ifrån den bristfälliga hemsidan som ska fungera som manual.
Det gjordes försök att få kontakt med grundarna utan framgång och inte heller de
svenska återförsäljarna hade kunskap för att lösa dessa problem. Efter mycket
undersökning på diverse forum och även en del chansningar så lyckades lösningar
utvecklas.
Väderförhållanden
En annan faktor som påverkade projektets gång var väderförhållandet. Farkosten
är mycket stabil i luften men påverkas betydande av olika väderförhållanden.
Främst positionen påverkas mycket av den aktuella vinden.
För att få så liten påverkan som möjligt på de avslutande jämförelsetesterna
gjordes dessa när väderförhållandena var som bäst. Detta gav resultat där
farkosten kunde manövreras utan större kompensation för vind. Testerna med de
olika regulatorerna kunde därför utföras med i princip samma förhållanden och i
sin tur ge bra jämförbar data.
6.4 Möjligt framtida arbete
Efter att grundmålet för projektet har uppnåtts finns det flera möjliga
påbyggnadsprojekt, som t.ex. brytpunktsnavigering och integrering av ny MEMSIMU och GPS på separat processorkort.
Mikrokopters plattform med Flight Control och Navigation Control är det
ingen större mening att försöka utveckla mer. Den näst intill obefintliga
dokumentationen och att koden till Navigation Control är stängd utgör ett stort
hinder.
Ett möjligt projekt skulle däremot kunna vara att skriva om den kod som
finns och utveckla en helt egen kod. Just för GPS-delen köptes ett par andra kort
in från ett helt open-source-projekt. Detta projekt grundades av ett antal
entusiaster som tröttnade på Mikrokopters dåliga dokumentation och bristfälliga
kod. Det är helt open-source och det finns dokumentation och guider till hur man
ska göra för att själv implementera olika regulatorer utan att behöva ändra något i
operativsystemskoden. Här hade det varit intressant att implementera flera olika
regulatorer förutom en vanlig PID regulator för att jämföra dessa. Med tillgång till
ett navigationskort och dess data skulle egna navigeringslösningar kunna
utvecklas och även implementation av hastighetsregulatorn skulle vara möjlig.
44
En utvecklingsmöjlighet för Simulinkmodellen är att integrera sändaren så att
man direkt kan använda input ifrån den och får en ännu bättre uppfattning om hur
farkosten kommer bete sig.
6.5 Slutsats
Att modellera en farkost utifrån teorin är inte speciellt svårt. Utmaningen ligger i
att göra en modell som beter sig som en verklig farkost, där är inte alltid teori och
verklighet samma sak. När modellen väl är utvecklad fungerar Simulinks
autogenereringsmetoder mycket bra. Integreringen mellan den autogenererade
koden och originalkod görs enkelt med grundläggande programmeringskunskaper.
45
7. Bibliografi
Bermes, Christian. Design and dynamic modeling of autonomous coaxial micro
helicopters. PhD Thesis ETH NO. 18847, Zürich: ETH, 2010.
Bouabdallah, Samir, Andre Noth, och Roland Siegwart. ”PID vs LQ Control
Techniques Applied to an Indoor Micro Quadrotor.” IEEE/RSJ International
Conference on Intelligent Robots and Systems. New Orleans, 2004. 24512456.
Colton, Shane. den 25 Juni 2007. http://web.mit.edu/scolton/www/filter.pdf
(använd den 5 November 2013).
Corke, Peter. Robotics, Vision and Control. 73. Springer, 2011.
Hamel, Tarek, Robert Mahoney, Rogelio Lozano, och James Ostrowski.
”Dynamic modelling and configuration stabilization for an X4-flyer.” 15th
IFAC World Congress. Barcelona, 2002.
Hossain, Raju, Geoff Rideout, och Nicholas Krouglicof. ”Bond Graph Dynamic
Modeling and Stabilization of a Quad-Rotor Helicopter.” Spring Simulation
Multiconference. Orlando: 219-227, 2010.
Hua, Minh-Duc, Tarek Hamel, Pascal Morin, och Claude Samson. ”Introduction
to Feedback Corntrol of Underactuated VTOL Vehicles.” IEEE Control
Systems Magazine, den 17 Januari 2013: 61-75.
Hägglund, Tore. Reglerteknik AK Föreläsningar. Lund: KFS sigma, 2008.
Luukkonen, Teppo. Modelling and control of quadcopter. Independent research
project in applied mathematics, Espoo: Aalto University, 2011.
Mahony, Robert, Vijay Kumar, och Peter Corke. ”Multirotor Aerial Vehicles.”
IEEE Robotics & Automation magazine, September 2012 : 20-32.
Mallikarjunan, Srinath, Bill Nesbitt, Evgeny Kharisov, Enric Xargay, och Naira
Hovakimyan. ”L1 Adaptive Controlle for Attitude Control of Multirotors.”
AIAA Guidance, Navigation and Control Conference. Minneapolis, 2012.
Pounds, Paul Edward Ian. Design, Construction and Control of a Large
Quadrotor Micro Air Vehicle. PhD Thesis, Canberra: Australian National
University, 2007.
Sa, Inkyu. ”Queensland University of Technology.” den September 19 2011.
https://wiki.qut.edu.au/download/attachments/145528940/MK_Doc.pdf?vers
ion=1&modificationDate=1339475905000 (använd den 5 November 2013).
Sa, Inkyu, och Peter Corke. ”Estimation and Control for an Open-Source
Quadcopter.” Australasian Conference on Robotics and Automation.
Melbourne, 2011.
Van de Maele, Pieter-Jan. u.d. http://www.pieter-jan.com/node/11 (använd den 4
November 2013).
46
Lund University
Department of Automatic Control
Box 118
SE-221 00 Lund Sweden
Document name
MASTER THESIS
Date of issue
February 2014
Document Number
ISRN LUTFD2/TFRT--5935--SE
Author(s)
Supervisor
Henrik Ohlsson
Hrvoje Corluka
Torbjörn Crona, Saab Dynamics
Karl-Erik Årzén, Dept. of Automatic Control, Lund
University, Sweden (examiner)
Sponsoring organization
Title and subtitle
Modeling and Control of an Octacopter
Abstract
This report deals with the theory and identification out of a multi-rotor craft, particularly an
OktokopterXL from Mikrokopter.de.
A model of the craft is constructed using Matlab Simulink and a PD controller is designed to control
the attitude of the craft. The controller is auto generated from Matlab to C code which is then
interwoven with the multi-rotor’s source code. The designed controller works well and also the model
corresponds well with reality.
The multirotor platform used is not very developer-friendly with hard to understand, uncommented
code and where the navigation board source code is not open source. However, the price and
performance still make it a very interesting platform.
Keywords
Classification system and/or index terms (if any)
Supplementary bibliographical information
ISSN and key title
ISBN
0280-5316
Language
Number of pages
Swedish
1-46
Security classification
http://www.control.lth.se/publications/
Recipient’s notes