Balansering
advertisement

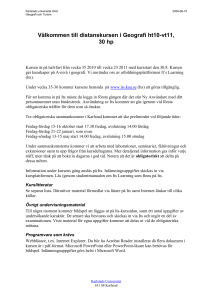
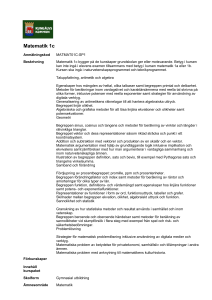
Kau Maskinteknik 2011-09-14/HJo Balansering • Med balansering kan man minska de vibrationer som har samma frekvens som varvtalet. • En obalans anges vanligen i grmm. T.ex. en rotor med massan 40 kg sitter förskjuten 0,1 mm vid sidan om axelcentrum, som också antas vara rotationscentrum. Detta ger obalansen 40000·0,1=4000grmm. En balanseringsvikt på t.ex. 200 mm´s radie behöver ha vikten 20 gr för att rotorn skall bli balanserad. • Andra orsaker till obalans än passningsfel kan t.ex. vara - Beläggningar och slitage - Ojämn massfördelning på grund av t.ex. svetsning, bearbetning eller gjutning. -Axelkrökning p.g.a. ojämn temperatur omkring axeln vid t.ex. kilar och kilspår. • När rotorn har liten axiell utsträckning kan i vissa fall statisk balansering vara tillräcklig. • Dynamisk balansering är att föredra. När rotorn har liten axiell utsträckning kan enplansbalansering vara tillräcklig. Styv rotor med axiell utsträckning fordrar tvåplansbalansering. Vek rotor med axiell utsträckning kan fordra balansering i flera plan. • Vid balansering mäts vibrationsnivån (t.ex. v̂ mm/s) och vibrationsriktningen (t.ex ϕ grader). Signal från vibr.givaren v̂ Tid t Signalpulser från varvtals.givaren Tid ϕ= t ⋅ 360 0 T T j Rotationsriktning ϕ i v̂ 1 Kau Maskinteknik 2011-09-14/HJo Enplansbalansering Anta att vi vid den första mätningen har v̂0 mm/s i riktning φ0 grader. Detta kan visas med en vektor i det s.k. mätplanet. Givaren sitter i det s.k. mätplanet som normalt ligger nära den rotor som skall balanseras. Observera att vinkeln φ mäts från läget för noll och mot rotationsriktningen. Vid balansering söker vi en lämplig balanseringsvikt mb som placeras på rotationsradien rb och vid en sådan vinkel φb att den orsakar en vibration som är motriktad v̂0 . Rotationsriktning v̂0 v̂0 φ0 φ0 Av balanseringsmassan mb placerad på radien rb vid vinkel φb orsakad vibration Följande tillvägagångssätt används för att finna mb, φb och rb. 1) Bestäm lämplig fastsättningsradie rb för balanseringsvikten på rotorn. 2) Markera ett lämpligt läge för φ = 0 på radien rb. Observera att detta behöver inte vara på samma ställe som där mätinstrumentet ger sin nollpuls. 3) Placera en provvikt mp på radien rp lämpligen vid läget för φ = 0 och mät den nya vibrationen v̂ p med tillhörande riktning φp. j Rotorn skall givetvis gå med samma varvtal vid alla mätningar. Storleken på mp skall väljas så att en tydlig v̂0 b 0 förändring kan mätas i vibrationen. φ0 4) Den av provmassan mp orsakade vibrationen är skillnaden a0 mellan v̂ p och v̂0 , vˆ p − vˆ0 . Skillnad är alltså en vektor med φp beloppet vˆ p − vˆ0 vars riktning betecknas med β . v̂ i p Denna vektor kan t.ex. bestämmas grafiskt eller med hjälp av vektor algebra. ~ ~ ~ ~ vˆ0 = a 0 ⋅ i + b0 ⋅ j och vˆ p = a p ⋅ i + b p ⋅ j 2 Kau Maskinteknik 2011-09-14/HJo v̂0 = a 20 +b02 och v̂ p = a p2 +b p2 bp b b tan φ0 = 0 och tan φp = φ = invtan + n ⋅ 180 0 där n=0 om a > 0 och n=1 om a < 0 a a0 ap ~ ~ vˆ p − vˆ0 = (a p − a 0 ) ⋅ i − (b p − b0 ) ⋅ j j vˆ p − vˆ0 = (a p − a 0 ) 2 + (b p − b0 ) 2 tan β = b p − b0 v̂0 a p − a0 vˆ p − vˆ0 5) Maskinens känslighet för balansering kan nu bestämmas som vˆ P − vˆ0 K= som normalt anges med enheten (mm/s)/grmm. m P ⋅ rP 6) Balanseringsviktens storlek bör nu justeras så att vˆ0 (oftast är rb=rp v̂0 =Kmbrb ⇒ mb = K ⋅ rb men ej nödvändigtvis) i β v̂ p vˆ p − vˆ0 7) Balanseringsviktens placering ϕ b + β = ϕ 0 + 180° ⇒ ϕ b = ϕ 0 + 180°- β 8) Provkör maskinen med balanseringsvikten. Om korrekta mätningar och beräkningar gjorts, samt om maskinen reagerar på det linjära sätt som beräkningarna bygger på¨, så har vibrationen väsentligt minskat. 9) Om resultatet inte är godtagbart kan ytterligare justeringar av balanseringsviktens storlek och placering bli nödvändiga. 10) När balanseringen avslutas mäts restobalansens vibration v̂ R . Tyngdpunktsfelet e kan nu uppskattas om rotorn har massan M M kg νR e M ⋅ e ⋅ K = vR eller M ⋅ e = vR K 3 Kau Maskinteknik 2011-09-14/HJo Tvåplansbalansering Vid tvåplansbalanseringen blir beräkningarna mera omfattande. För att beskriva maskinens känslighet för balansering behöver vi nu bestämma fyra konstanter. Maskinens känslighet i mätplan 1 för balanseringsvikt i balanseringsplan 1 respektive 2 samt motsvarande känsligheter i mätplan 2. Dessa fyra konstanter betecknas t.ex. med Kkl. Där index k betecknar mätplan nummer k och l betecknar balanseringsvikt i plan nummer l. Som exempel betecknas maskinens känslighet i mätplan 1 för balanseringsvikt i balanseringsplan 2 då med K12 (mm/s)/(grmm). Med samma beteckningssystem fås v̂ij betecknar vibration i mätplan i med balanseringsvikt i balanseringsplan j. ϕij betecknar vinkel för vibration i mätplan i med balanseringsvikt i balanseringsplan j vid 0°. Plan 2 j v̂20 ϕ20 Plan 1 j i v̂10 ϕ10 i Figuren ovan visar de två mätplanen med inlagda vektorer för de uppmätta vibrationerna. Låt oss nu beteckna balanseringsvikterna med mkn där index k betecknar numret på det balanseringsplan där vikten placeras och n betecknar balanseringsviktens nummer. På samma sätt betecknar rk den radie som balanseringsvikten placeras på i plan k. 1) Först placerar vi en provvikt i balanseringsplan 1 vid 0°. Provvikten har massan m11 och placeras på radie r1. 2) De nya vibrationerna mäts och betecknas v̂11 , ϕ11 i mätplan 1 och följaktligen v̂ 21 , ϕ21 i mätplan 2. Se figuren nedan 4 Kau Maskinteknik 2011-09-14/HJo Plan 2 j v̂ 20 Plan 1 j v̂21 v̂10 v̂11 ϕ11 i ϕ21 ϕ10 i Förändringen i vibrationerna är alltså orsakade av vikten som placerats i plan 1 vid noll grader. Känsligheten för balanseringsvikt i plan 1 kan då bestämmas Plan 2 j v̂20 Plan 1 j β12 v̂10 v̂11 i v̂21 v̂11 − v̂10 v̂21 − v̂20 β11 i Känslighet i plan 1 för balanseringsvikt i plan 1 K11 = Känslighet i plan 2 för balanseringsvikt i plan 1 K 21 = v̂11 − v̂10 m11 ⋅ r1 v̂ 21 − v̂20 m11 ⋅ r1 β11 är vinkeln för vibrationen i plan 1 som orsakas av balanseringsvikt placerad i 0° i plan 1. 5 Kau Maskinteknik 2011-09-14/HJo β21 är vinkeln för vibrationen i plan 2 som orsakas av balanseringsvikt placerad i 0° i plan 1. Genom att sedan ta bort balanseringsvikten i plan 1 och istället placera en balanseringsvikten i plan 2. Kan motsvarande storheter bestämmas. Denna balanseringsvikt betecknas alltså m21 på radie r2. Känslighet i plan 1 för balanseringsvikt i plan 2 K 12 = Känslighet i plan 2 för balanseringsvikt i plan 2 K 22 = vˆ12 − vˆ10 m21 ⋅ r2 vˆ22 − vˆ10 m21 ⋅ r2 β12 är vinkeln för vibrationen i plan 1 som orsakas av balanseringsvikt placerad i 0° i plan 2. β22 är vinkeln för vibrationen i plan 2 som orsakas av balanseringsvikt placerad i 0° i plan 1. Med hjälp av dessa 8 konstanter kan sedan balanseringsvikten i plan 1, m1b, och dess placering ϕ1b och balanseringsvikten i plan 2, m2b, och dess placering ϕ2b Bestämmas så att de två balanseringsvektorerna ”släcker” de båda obalansvektorer som vi hade från början. Ekvationerna löses lämpligen med hjälp av balanseringsinstrumentet. Plan 2 j v̂ 20 Plan 1 j i v̂10 i Vektor p.g.a m1b, ϕ1b och m2b, ϕ2b i mätplan 1 Vektor p.g.a m1b, ϕ1b och m2b, ϕ2b i mätplan 1 6