Balansering - Karlstads universitet
advertisement

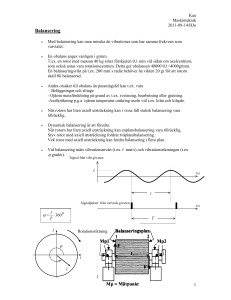
Kau Maskinteknik 2006-02-03/HJo Balansering • Med balansering kan man minska de vibrationer som har samma frekvens som varvtalet. • En obalans anges vanligen i grmm. T.ex. en rotor med massan 40 kg sitter förskjuten 0,1 mm vid sidan om axelcentrum, som också antas vara rotationscentrum. Detta ger obalansen 40000·0,1=4000grmm. En balanseringsvikt på t.ex. 200 mm´s radie behöver ha vikten 20 gr för att rotorn skall bli balanserad. • Andra orsaker till obalans än passningsfel kan t.ex. vara - Beläggningar och slitage - Ojämn massfördelning på grund av t.ex. svetsning, bearbetning eller gjutning. -Axelkrökning p.g.a. ojämn temperatur omkring axeln vid t.ex. kilar och kilspår. • När rotorn har liten axiell utsträckning kan i vissa fall statisk balansering vara tillräcklig. • Dynamisk balansering är att föredra. När rotorn har liten axiell utsträckning kan enplansbalansering vara tillräcklig. Styv rotor med axiell utsträckning fordrar tvåplansbalansering. Vek rotor med axiell utsträckning kan fordra balansering i flera plan. • Vid balansering mäts vibrationsnivån (t.ex. v̂ mm/s) och vibrationsriktningen (t.ex ϕ grader). Signal från vibr.givaren v̂ Tid t Signalpulser från varvtals.givaren Tid ϕ= t ⋅ 360 0 T T j Rotationsriktning ϕ i v̂ 1 Kau Maskinteknik 2006-02-03/HJo Enplansbalansering Anta att vi vid den första mätningen har v̂0 mm/s i riktning φ0 grader. Detta kan visas med en vektor i det s.k. mätplanet. Givaren sitter i det s.k. mätplanet som normalt ligger nära den rotor som skall balanseras. Observera att vinkeln φ mäts från läget för noll och mot rotationsriktningen. Vid balansering söker vi en lämplig balanseringsvikt mb som placeras på rotationsradien r och vid en sådan vinkel φb att den orsakar en vibration som är motriktad v̂0 . Rotationsriktning v̂0 v̂0 φ0 φ0 Av balanseringsmassan mb placerad på radien r vid vinkel φb orsakad vibration Följande tillvägagångssätt används för att finna mb, φb och r. 1) Bestäm lämplig fastsättningsradie r för balanseringsvikten på rotorn. 2) Markera ett lämpligt läge för φ = 0 på radien r. Observera att detta behöver inte vara på samma ställe som där mätinstrumentet ger sin nollpuls. 3) Placera en provvikt m1 på radien r lämpligen vid läget för φ = 0 och mät den nya vibrationen v̂1 med tillhörande riktning φ1. j Rotorn skall givetvis gå med samma varvtal vid alla mätningar. Storleken på m1 skall väljas så att en tydlig v̂0 b 0 förändring kan mätas i vibrationen. 4) Den av balanserings massan m1 orsakade vibrationen är r r skillnaden mellan v̂1 och v̂0 , v1 − v0 . Skillnad är alltså en r r vektor med beloppet v1 − v0 vars riktning betecknas med β . Denna vektor kan t.ex. bestämmas grafiskt eller med hjälp av vektor algebra. φ0 a0 φ1 i v̂1 r r ~ ~ ~ ~ v0 = a0 ⋅ i + b0 ⋅ j och v1 = a1 ⋅ i + b1 ⋅ j 2 Kau Maskinteknik 2006-02-03/HJo v̂0 = a 20 +b02 och v̂1 = a 21 +b12 b b b tan φ0 = 0 och tan φ1 = 1 φ = invtan + n ⋅ 180 0 där n=0 om a > 0 och n=1 om a < 0 a0 a1 a r r ~ ~ v1 − v0 = ( a1 − a0 ) ⋅ i − ( b1 − b0 ) ⋅ j j b −b tan β = 1 0 a1 − a0 r r v1 − v 0 = (a1 − a 0 ) 2 + (b1 − b0 ) 2 v̂0 r r v1 − v0 5) Maskinens känslighet för balansering kan nu bestämmas som r r v1 − v0 K1 = som normalt anges med enheten (mm/s)/grmm. m1 ⋅ r i β v̂1 r r v1 − v0 6) Balanseringsviktens storlek bör nu justeras så att v̂0 v̂0 =K1mbr ⇒ mb = K1 ⋅ r 7) Balanseringsviktens placering ϕ b + β = ϕ 0 + 180° ⇒ ϕ b = ϕ 0 + 180°- β 8) Provkör maskinen med balanseringsvikten. Om korrekta mätningar och beräkningar gjorts, samt om maskinen reagerar på det linjära sätt som beräkningarna bygger på¨, så har vibrationen väsentligt minskat. 9) Om resultatet inte är godtagbart kan ytterligare justeringar av balanseringsviktens storlek och placering bli nödvändiga. 10) När balanseringen avslutas mäts restobalansens vibration v̂ R . Tyngdpunktsfelet e kan nu uppskattas om rotorn har massan M M kg νR e M ⋅ e ⋅ K = vR eller M ⋅ e = vR K 3 Kau Maskinteknik 2006-02-03/HJo Tvåplansbalansering Vid tvåplansbalanseringen blir beräkningarna mera omfattande. För att beskriva maskinens känslighet för balansering behöver vi nu bestämma fyra konstanter. Maskinens känslighet i mätplan 1 för balanseringsvikt i balanseringsplan 1 respektive 2 samt motsvarande känsligheter i mätplan 2. Dessa fyra konstanter betecknas t.ex. med Kkl. Där index k betecknar mätplan nummer k och l betecknar balanseringsvikt i plan nummer l. Som exempel betecknas maskinens känslighet i mätplan 1 för balanseringsvikt i balanseringsplan 2 då med K12 (mm/s)/(grmm). Med samma beteckningssystem fås v̂ij betecknar vibration i mätplan i med balanseringsvikt i balanseringsplan j. ϕij betecknar vinkel för vibration i mätplan i med balanseringsvikt i balanseringsplan j vid 0°. Plan 2 j v̂20 ϕ20 Plan 1 j i v̂10 ϕ10 i Figuren ovan visar de två mätplanen med inlagda vektorer för de uppmätta vibrationerna. Låt oss nu beteckna balanseringsvikterna med mkn där index k betecknar numret på det balanseringsplan där vikten placeras och n betecknar balanseringsviktens nummer. På samma sätt betecknar rk den radie som balanseringsvikten placeras på i plan k. 1) Först placerar vi en provvikt i balanseringsplan 1 vid 0°. Provvikten har massan m11 och placeras på radie r1. 2) De nya vibrationerna mäts och betecknas v̂11 , ϕ11 i mätplan 1 och följaktligen v̂ 21 , ϕ21 i mätplan 2. Se figuren nedan 4 Kau Maskinteknik 2006-02-03/HJo Plan 2 j v̂ 20 Plan 1 j v̂21 v̂10 v̂11 ϕ11 i ϕ21 ϕ10 i Förändringen i vibrationerna är alltså orsakade av vikten som placerats i plan 1 vid noll grader. Känsligheten för balanseringsvikt i plan 1 kan då bestämmas Plan 2 j v̂20 Plan 1 j β12 v̂10 v̂11 i v̂21 v̂11 − v̂10 v̂21 − v̂20 β11 i Känslighet i plan 1 för balanseringsvikt i plan 1 K11 = Känslighet i plan 2 för balanseringsvikt i plan 1 K 21 = v̂11 − v̂10 m11 ⋅ r1 v̂ 21 − v̂20 m11 ⋅ r1 β11 är vinkeln för vibrationen i plan 1 som orsakas av balanseringsvikt placerad i 0° i plan 1. 5 Kau Maskinteknik 2006-02-03/HJo β21 är vinkeln för vibrationen i plan 2 som orsakas av balanseringsvikt placerad i 0° i plan 1. Genom att sedan ta bort balanseringsvikten i plan 1 och istället placera en balanseringsvikten i plan 2. Kan motsvarande storheter bestämmas. Denna balanseringsvikt betecknas alltså m21 på radie r2. Känslighet i plan 1 för balanseringsvikt i plan 2 K 12 = Känslighet i plan 2 för balanseringsvikt i plan 2 K 22 = vˆ12 − vˆ10 m21 ⋅ r2 vˆ22 − vˆ10 m21 ⋅ r2 β12 är vinkeln för vibrationen i plan 1 som orsakas av balanseringsvikt placerad i 0° i plan 2. β22 är vinkeln för vibrationen i plan 2 som orsakas av balanseringsvikt placerad i 0° i plan 1. Med hjälp av dessa 8 konstanter kan sedan balanseringsvikten i plan 1, m1b, och dess placering ϕ1b och balanseringsvikten i plan 2, m2b, och dess placering ϕ2b Bestämmas så att de två balanseringsvektorerna ”släcker” de båda obalansvektorer som vi hade från början. Ekvationerna löses lämpligen med hjälp av balanseringsinstrumentet. Plan 2 j v̂ 20 Plan 1 j i v̂10 i Vektor p.g.a m1b, ϕ1b och m2b, ϕ2b i mätplan 1 Vektor p.g.a m1b, ϕ1b och m2b, ϕ2b i mätplan 1 6 Kau/Maskinteknik/sept-09/HJo EX. Enplansbalansering. Vid provkörningarna under balanseringen uppmättes följande mätvärden: Balanseringsvikterna placerades på radien 540 mm. Provkörning Vibration i mm/s 1 2 5,60 8,25 Vinkel Vikt i gram 125° 85° 0 provvikt 100 Vikt vid vinkeln vid 0° a/ Bestäm grafiskt balanseringsviktens storlek och placering, om provvikten avlägsnas och balanseringsvikten sätts in på samma radie som provvikten. Använd bifogat diagram. b/ Hur stor är rotorns tyngdpunktsförskjutning, efter balanseringen. Rotormassan är 65 kg och slutresultatet blev enligt tabellen nedan. Provkörning Vibration i mm/s Vinkel Vikt i gram Vikt vid vinkeln 3 1,25 15° Balanseringsvikt Placering enl. a/ enl. a/ 90° 75° Rotationsriktning 60° 45° 30° 15° 0° 180° 270° Karlstads universitet Maskinteknik 2009-05-27/HJo 90° 75° 60° 5,35 mm/s Rotationsriktning 45° 8,25 mm/s 43° 30° 5,60 mm/s 15 0 180° 270° mm 5,35 −5 s K= ≈ 9,91 ⋅ 10 100 ⋅ 540 gr ⋅ mm β ≈ 430 Balanseringsvikt med provvikten borttagen: 5,6 mb = ≈ 105 gr vid 125+180-43=2620 9,91 ⋅ 10 −5 ⋅ 540 Restobalans om v =1,25 mm/s M ⋅e = v K = 1,25 1,25 ⇒ e= = 0,002mm −5 9,91 ⋅ 10 9,91 ⋅ 10 −5 ⋅ 65 ⋅ 10 3 UTDRAG ur SSG3030. Skogsindustriernas teknik AB