Analys 360
En webbaserad analyskurs
Grundbok
Ekvationslösning och
inversa funktioner
Anders Källén
MatematikCentrum
LTH
[email protected]
Ekvationslösning och inversa funktioner
1 (9)
Introduktion
I det här kapitlet ska vi diskutera hur man löser en ekvation f (x) = y. Vi börjar med en
diskussion om hur man grafiskt ser hur många lösningar det finns och ungefär vilka de
är. Därefter diskuterar vi Newtons metod som numeriskt kan bestämma dessa nollställen
till önskad precision.
Därefter fokuserar vi på situationen när det finns precis en lösning till ekvationen (funktionen sägs då vara injektiv). Då kommer lösningen x att bli en funktion av högerledet y,
en funktion som kallas inversen till den ursprungliga funktionen. Vi diskuterar hur vi kan
skissera grafen för denna invers utifrån grafen för ursprungsfunktionen, samt hur vi kan
bestämma inversens derivata. I samband härmed härleder vi också den viktiga kedjeregeln
för derivation av sammansatt funktion.
Ekvationslösning
Att lösa en ekvation f (x) = y innebär att vi för fixt y vill hitta alla x som löser denna
ekvation. För att få reda på hur många lösningar som finns och ungefär var dessa ligger
kan man i en variabel ofta använda sig av grafritning.
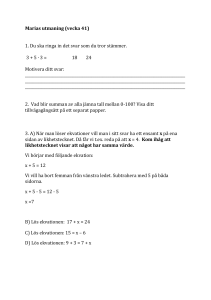
Exempel 1 För att se hur många lösningar ekvationen f (x) = y har för olika y när
f (x) = x4 − 4x3 − 20x2 + 25,
skisserar vi först grafen för funktionen. Vi ser att limx→±∞ f (x) = ∞, samt att
f 0 (x) = 4x3 − 12x2 − 40x = 4x(x + 2)(x − 5).
Vi ser att f har stationära punkter i x =
−2, 0, 5 och att vi får följande teckentabell:
x:
−2
0
5
0
f (x) − 0 + 0 −
0
+
f (x) & −7 % 25 & −350 %
Vi har därför lokala minima i x = −2, 5 och
ett lokalt maximum i x = 0. Grafen till funktionen är ritad till höger.
Från denna graf kan vi nu avläsa hur många
lösningar ekvationen f (x) = a har för olika
a, genom att se efter hur många skärningar
vi har mellan grafen y = f (x) och den horisontella linjen y = a (några av vilka är
ritade röda figuren). Vi ser att svaret kan
sammanfattas i följande tabell
y
−4
−3
−2
100
80
60
40
20
−1
−20
−40
−60
−80
−100
−120
−140
−160
−180
−200
−220
−240
−260
−280
−300
−320
−340
1
2
3
4
5
6
7
8
0
1
2
3
4
a < −350 a = −350 −350 < a < −7 a = −7 eller a = 25 −7 < a < 25
9
10
x
Ekvationslösning och inversa funktioner
2 (9)
Men detta ger oss endast antalet rötter. Hur får vi reda på t.ex. vilka nollställena är? En
metod ska diskuteras i nästa avsnitt.
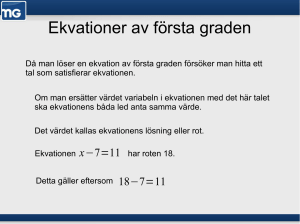
Låt oss dock först göra följande observation. Om vi byter x mot y får vi en kurva x = f (y)
som vi kan rita på följande sätt: vi speglar kurvan y = f (x) i linjen y = x. Detta kan
alternativt göras så att vi roterera kurvan y = f (x) ett kvarts moturs och därefter speglar
den i y-axeln. Vi får följande kurva
y 10
5
−350
−300
−250
−200
−150
−100
−50
50
100
x
−5
Vad kurvan visar är vilka lösningar vi får till ekvationen f (x) = y: vi tar x = y i figuren
och ser efter vilka värden vi då får. Detta är illustrerat med y = −50 genom att vi ritat ut
den röda linjen x = −50 och ser efter var den skär den blå kurvan. Motsvarande y-värden
ger de x-värden som är lösningen på ekvationen[1]
Som tabellen ovan och figuren till höger visar får vi (med undantag för x = −350) flera
värden till ett givet x-värde, så denna kurva är inte en graf till en funktion. En kurva är
endast graf till en funktion om varje x ger precis ett y.
Numerisk bestämning av ett rot
Vi ska nu se hur vi kan bestämma ett närmevärde till en lösning till en ekvation f (x) = y.
Det räcker om vi diskuterar fallet y = 0, för om vi har ett annat högerled, t.ex. f (x) = 10,
så kan vi använda vad vi kommer fram till på funktionen x → f (x) − 10. Vi börjar med
ett exempel.
Exempel 2 För funktionen
f (x) = x3 − 3x + 1
gäller att f 0 (x) = 3(x2 −1), så de stationära punkterna är x = ±1. Ett teckenstudium
ger att x = −1 är ett lokalt maximum i vilket funktionen tar värdet 3, medan x = 1
är ett lokalt minimum i vilket funktionen tar värdet −1. Det följer därför att det
måste finnas ett nollställe till polyomet någonstans i intervallet −1 < x < 1. Men
hur ska vi hitta den?
Ekvationslösning och inversa funktioner
3 (9)
Problemet vi ska diskutera är att hitta en lösning till en ekvation f (x) = 0 som ligger i
närheten av någon punkt x0 . Vi vet då att nära x0 gäller att
f (x) ≈ f (x0 ) + f 0 (x0 )(x − x0 ).
Det betyder att ekvationen f (x) = 0 är approximativt ekvationen
f (x0 ) + f 0 (x0 )(x − x0 ) = 0,
vilken har lösningen (vi antar att f 0 (x0 ) 6= 0)
y
0
f(
)=
x0
′
f(
)(x
x0
Detta ger naturligtvis i allmänhet inte den sökta
lösningen, men har vi tur har vi fått en bättre approximation än den vi startade med.
y−
x = x0 − f (x0 )/f (x0 ).
−
)
x0
Låt oss kalla den nya approximationen x1 . Geometriskt innebär diskussionen ovan att vi dragit tangenten till kurvan y = f (x) i punkten x0 och bestämt
dess skärning x = x1 med x-axeln. Det vi hoppas är
att denna punkt ligger närmare den sanna roten än
vad vår startpunkt x0 gjorde.
y = f (x)
x0
x1
x
Vi kan sedan dra tangenten till grafen för f i den nya
punkten x1 och bestämma en ny approximation x2 till roten till ekvationen f (x) = 0
som skärningen mellan den och x-axeln. Och så vidare, tills vi inte ser någon ändring i
värdena vi får fram.
Exempel 3 Vi fortsätter exemplet ovan och använder
då till
1
f (x0 )
=0−
=
x1 = x 0 − 0
f (x0 )
−3
x0 = 0. Formeln ovan leder
1
.
3
Vi kan nu upprepa detta med x1 = 1/3 som nytt x0 , och får ett nytt närmevärde
x2 = x1 −
1
1/27
f (x1 )
= −
= 0.3472.
0
f (x1 )
3 −8/3
Fortsätter vi denna process ett par gånger finner vi
x3 = 0.3473,
x4 = 0.3473,
x5 = 0.3473.
Vi ser att dessa fyra decimaler inte ändrar sig hur länge vi än håller på. Rimligtvis
har vi bestämt det okända nollstället med fyra decimaler.
Denna metod att förbättra ett närmevärde x0 till en rot till ekvationen f (x) = 0 genom
att successivt definiera x1 , x2 , . . . genom relationen
xn+1 = xn −
f (xn )
f 0 (xn )
Ekvationslösning och inversa funktioner
4 (9)
kallas Newton-Raphsons metod. Det går att visa att om vi bara börjar tillräckligt nära
den okända roten, så kommer processen att konvergera mot denna[2] .
Det finns dock ingen garanti för konvergens i det enskilda fallet, som nästa exempel visar:
Exempel 4 I närheten av x = 4 har polynomet
f (x) = −x3 + 2x2 + 5x + 6
ett nollställe. Om vi ställer upp Newton-Raphsons algoritm med startvärdet x0 = 1,
så finner vi att
x1 = −1, x2 = 1, x3 = −1, x4 = 1,
och så vidare. Vi ser alltså att vi inte får konvergens mot något nollställe.
y
15
10
5
−2
−1
1
2
3
4
x
Detta beror delvis på att vi började för långt ifrån det riktiga nollstället. Att det
blev en 2-cykel beror till stor del på att vi hoppar runt ett lokalt minimum.
Inversa funktioner
Om ekvationen f (x) = y har högst en lösning för alla y, säger man att funktionen f är
injektiv. Låt Vf beteckna de y för vilka ekvationen har en lösning. Den mängden kallas
funktionens värdemängd. Låt vidare Df beteckna de x för vilka f är definierad – en
mängd som kallas funktionens definitionsmängd. Då gäller alltså att f : Df → Vf .
Att funktionen är injektiv innebär då att det till varje y ∈ Vf finns precis ett x ∈ Df .
Denna process definierar en funktion Vf → Df som kallas inversen till f och betecknas
f −1 .
Exempel 5 Om vi sätter f (x) = x2 , som är definierad för alla x, så gäller att
Vf = {y; y ≥ 0}. Ekvationen f (x) = y, alltså x2 = y, är då lösbar för alla y ≥ 0. Det
√
finns två lösningar om y 6= 0, nämligen x = ± y, så funktionen är inte injektiv.
Om vi emellertid inskränker definitionsområdet till de x som är sådana att x ≥ 0,
så är funktionen injektiv och ekvationen entydigt lösbar. Den inversa funktionen är
√
precis den funktion som vi har gett “namnet” (beteckningen) .
Ekvationslösning och inversa funktioner
5 (9)
Om vi har grafen till en injektiv funktion så kan vi
rita grafen till dess invers utan att behöva veta vilket
uttryck som definierat den ursprungliga funktionen.
Att det är så beror på den fundamentala relationen
f (x) = y
⇔
y 3
y = f (x)
2
x = f −1 (y).
y = f −1 (x)
1
De två ekvationerna här definierar alltså samma kurva, men när vi vill rita grafen till f −1 så ska vi rita kurvan y = f −1 (x). Detta innebär att rita kurvan
f (y) = x, och vi såg i början av kapitlet att vi gör det
genom att spegla kurvan y = f (x) i linjen y = x.
1
2
3
4
x
Figuren till ovan till höger visar detta för√funktionen f (x) = x2 , x ≥ 0. Grafen till f är
den blå kurvan och dess invers, f −1 (x) = x är den röda kurvan.
√
1
På samma sätt kan vi definiera funktionen x n = n x som invers till funktionen y =
xn , x ≥ 0 för ett godtyckligt heltal n 6= 0.
Anmärkning Om n är udda, så gäller att funktionen xn är en funktion från R → R,
sådan
att dess invers x1/n kan definieras√för alla x. Det betyder√att medan uttrycket
√
−2 inte finns som reellt tal, så finns 3 −2 och är lika med − 3 2. Dock är inversen
inte deriverbar i origo (varför?[3] )
Derivatan av en invers
Vi kan också beräkna derivatan av en invers funktion uttryckt i derivatan av den ursprungliga funktionen.
Ett sätt att göra det är rent geometriskt och illustreras
i figuren till höger. I den använder vi beteckningen
dy = y − f (a) och dx = x − a.
I ord visar figuren följande. Grafen till den ursprungliga funktionen ges av ekvationen y = f (x) och dess
tangent i punkten x = a har ekvationen
y
dy = f ′ (a)dx
y = f (x)
y − f (a) = f 0 (a)(x − a).
dy =
Speglar vi tangenten i linjen y = x får vi tangenten
till kurvan y = f −1 (x) och den speglade tangentens
ekvation är
y
′ )d
f (a
y = f −1 (x) ⇔ x = f (y)
a
x − f (a) = f 0 (a)(y − a).
1 dx
)
f′ (a
x=
⇔d
f (a)
x
Den är tangent till kurvan y = f −1 (x) i punkten b = f (a), vilket innebär att a = f −1 (b).
Med andra ord, kurvan y = f −1 (x) har en tangent i punkten b = f (a) (och är därför
deriverbar där) som har ekvationen
y − f −1 (b) =
1
(x − b).
f 0 (a)
Ekvationslösning och inversa funktioner
6 (9)
Det i sin tur betyder att vi har visat följande sats
Sats 1
Låt f vara en injektiv funktion med invers f −1 . Om f är deriverbar i punkten a
med f 0 (a) 6= 0 och inversen är kontinuerlig i f (a)[4] , så är f −1 deriverbar i punkten
b = f (a) med derivatan
1
(f −1 )0 (b) = 0 .
f (a)
Beviset ovan är rent grafiskt, och kan inte generaliseras till funktioner av fler variabler. Vi
kompletterar därför med ett bevis som bygger direkt på definitionen av derivatan. (Det
är dock samma bevis.)
Bevis. Eftersom f är deriverbar i a kan vi skriva f (x) − f (a) = A(x)(x − a) där A(x) är
kontinuerlig i a. Om A(a) = f 0 (a) 6= 0 gäller att A(x) 6= 0 i någon omgivning av a, och
för sådana x kan vi skriva
x−a=
1
(f (x) − f (a)).
A(x)
Om vi inför den inversa funktionen i detta, x = f −1 (y), blir detta
f −1 (y) − f −1 (b) =
1
A(f −1 (y))
(y − b).
Men här är B(y) = 1/A(f −1 (y)) en kontinuerlig funktion av y nära b, och dess värde i b
är 1/f 0 (f −1 (b)) = 1/f 0 (a). Därmed är satsen fullständigt bevisa[5] .
1
Exempel 6 Vi ska beräkna derivatan av funktionen x n . Vi vet då att denna är
invers till funktionen f (x) = xn . Om vi ska beräkna värdet av inversens derivata i
1
en punkt b ska vi först hitta det a som är sådant att b = f (a) = an , alltså a = b n .
Derivatan av f i den punkten är nu
1
f 0 (a) = nan−1 = n(b n )n−1 = nb
så vi ser att
(f −1 )0 (b) =
Vi ser alltså att formeln (xn )0 = nxn−1
för bråk på formen 1/n.
1
n−1
n
=
n−1
n
,
1 1 −1
bn .
n
nb
gäller inte bara om n är ett heltal, utan även
I nästa avsnitt ska vi se att denna derivationsformel gäller för alla rationella exponenter
och i ett senare kapitel att den gäller för alla reella exponenter.
Ekvationslösning och inversa funktioner
7 (9)
Kedjeregeln
Vi såg i föregående avsnitt att om α är ett heltal eller ett genom ett heltal så gäller att
(xα )0 = αxα−1 .
Vi vill nu visa att det gäller för godtyckliga rationella tal α = p/q genom att först
bevisa en formel som är av mycket större betydelse än att den ger detta resultat. Formeln
ifråga talar om hur man deriverar en sammansatt funktion och kallas kedjeregeln. Den
sammansatta funktionen definieras som den funktion f ◦ g som beräknas genom
(f ◦ g)(x) = f (g(x)).
Sats 2: Kedjeregeln
Låt f, g vara två funktioner sådana att den sammansatta funktionen f ◦g är definierad
i punkten a, och antag att g är deriverbar i punkten a och f är deriverbar i punkten
b = g(a). Då gäller att även f ◦ g är deriverbar i a och att
(f ◦ g)0 (a) = f 0 (g(a))g 0 (a).
Bevis. Enligt förutsättningarna kan vi skriva
f (y) − f (b) = Af (y)(y − b),
g(x) − g(a) = Ag (x)(x − a),
där Af är kontinuerlig nära b och Ag är kontinuerlig nära a, och sådana att Af (b) = f 0 (b)
och Ag (a) = g 0 (a). Men då följer med b = g(a) att
f (g(x)) − f (g(a)) = Af (g(x))(g(x) − b) = Af (g(x))(g(x) − g(a)) = Af (g(x))Ag (x)(x − a).
Vi kan alltså skriva
(f ◦ g)(x) − (f ◦ g)(a) = A(x)(x − a),
där A(a) = Af (g(a))Ag (a) = f 0 (g(a))g 0 (a). Detta bevisar kedjeregeln.
Anmärkning Definition av den inversa funktionen innebär att
(f ◦ f −1 )(x) = (f −1 ◦ f )(x) = x
för alla x som uttrycken kan beräknas för. Båda formlerna innebär att x = f −1 (y) är
lösningen på ekvationen f (x) = y, fast på lite olika sätt.[6] Om vi deriverar formeln
(f −1 ◦ f )(x) = x får vi enligt kedjeregeln att
(f −1 )0 (f (x))f 0 (x) = 1
⇔
(f −1 )0 (f (x)) =
1
,
f 0 (x)
vilket är formeln för derivatan av en invers funktion från ovan.
Ekvationslösning och inversa funktioner
8 (9)
p
Exempel 7 Vi ska nu derivera funktionen h(x) = x q där p, q är heltal[7] . Vi observerar då att vi enligt potenslagarna kan vi skriva h(x) = f (g(x)), där
f (x) = xp ,
1
g(x) = x q .
Enligt kedjeregeln har vi nu att
1
1 1
p p−1 1
p p
h0 (x) = f 0 (g(x))g 0 (x) = pg(x)p−1 g 0 (x) = p(x q )p−1 x q −1 = x q + q −1 = x q −1 .
q
q
q
Anmärkning I ett tidigare kapitel härledde vi derivationsformeln (1/g)0 (a) = −g 0 (a)/g(a)2
om g(a) 6= 0 direkt från definitionen. Vi kan emellertid härleda den utifrån att
(1/x)0 = −1/x2 och kedjeregeln också:
1
g 0 (a)
( )0 (a) = (f ◦ g)0 (a) = f 0 (g(a))g 0 (a) = −
.
g
g(a)2
Vi avslutar detta kapitel med ett exempel som visar att det är viktigt att kunna identifiera sammansatta funktioner – att ha klart för sig vad en storhet är funktion av i varje
situation.
Exempel 8 Ett barn blåser långsamt upp en ballong genom att blåsa in 2 dl luft per
sekund. Alldeles innan ballongen spricker är dess radie 6 cm. Hur snabbt sträcktes
ballongytan vid detta ögonblick?
För att lösa problemet approximerar vi ballongen med en sfär. Vi vet att då gäller
att om V är dess volym och S dess area när radien är r, så är
4
V = πr3 ,
3
S = 4πr2 .
Om vi löser ut r som funktion av V och stoppar in i uttrycket för S, får vi att
√
3
S(V ) = 36πV 2/3 .
Men här ändrar sig V , och alltså S, med tiden, eftersom S(t) = S(V (t)). Deriverar
vi denna formel med avseende på t genom att använda kedjeregeln får vi att
S 0 (t) = S 0 (V (t))V 0 (t) =
√
3
2
36π V −1/3 V 0 (t).
3
Vi har att V 0 (t) = 2 då ballongen spricker, vilket sker då V (t) = 4π63 /3. Stoppar vi
in detta får vi att
√
2 3 36π
2
2
0
p
S (t) =
·
2
=
·
2
=
cm2 /s.
3
3 6 4π/3
6
3
Ekvationslösning och inversa funktioner
9 (9)
Anmärkning I det här exemplet har vi använt samma namn S på vad som egentligen
är olika funktioner. Vi har en funktion S(V ) som beskriver S som funktion av V . Vi
har också en funktion som beskriver S som funktion av t, som vi skrivit S(t). Om
funktionen V (t) beskriver volymen som funktion av tiden så gäller att S(t) = S(V (t)).
Förvirrande? Behöver inte vara så om vi istället tänker på S som en variabel som vi
ibland beskriver hur den beror av V , ibland hur den beror av t. Lägg märke till att
kedjeregeln ofta skrivs på formen
dS dV
dS
=
,
dt
dV dt
vilken innehåller precis den beskrivna oegentligheten.
Noteringar
1. Förvirrande med hoppandet mellan x och y? Det är just detta som är problemet med invers
funktion som detta kapitel handlar om.
2. Detta diskuteras t.ex. i artikeln Grafisk analys av en skalär rekursion
3. För heltal n > 1 gäller att derivatan av x → xn är noll i origo. Dess tangent är alltså
horisontell, vilket betyder att inversens tangent är vertikal.
4. Detta villkor är uppfyllt t.ex. om f är deriverbar i en omgivning av a med kontinuerlig
derivata.
5. Notera att vi behövde veta att inversen var kontinuerlig för att kunna dra slutsatsen att B
är det.
6. Formeln (f ◦ f −1 )(x) = x betyder att ekvationen f (y) = x har lösningen y = f −1 (x), medan
ekvationen (f −1 ◦ f )(x) = x betyder x = f −1 (y) är sådant att f (x) = y.
7. För definitionen av xp/q , se Arbetsbladet om potenser och potenslagar.