4E1402, Marindesign och 4E1132, Lättviktsdesign
advertisement

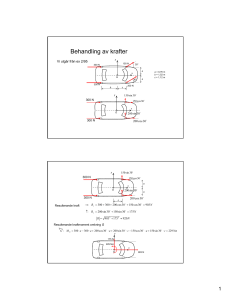
4E1402, Marindesign och 4E1132, Lättviktsdesign Projektdokument, grupp Styrbord Lars Viebke och Benny Sjöbeck Utvärderingsdokument 17-07-15 1(5) Version 1.0 Kite + segel Två varianter av lösning med kite och segel behandlas här. Koncept 1 Se figur 1 nedan. Kiten är infäst så att angreppspunkten för dess dragkraft på centerbordet befinner sig nedanför angreppspunkten för resultanten av reaktionskrafterna från vattnet. Då ger kiten ett moment som vill kränga båten åt babord. För att kompensera för detta moment och för att ge ytterligare dragkraft har båten även en mast med segel alternativt en fast vinge, som alltså ger ett motverkande moment åt styrbord. ”Pontonerna” på sidorna är avsedda att kompensera för jämviktsstörningar i framförallt accelerationsfasen, då krafterna från kite och segel kan vara ojämna. Fk cos Figur 1. Vy akterifrån. Fs = sidkraft från segel Fk = dragkraft från kite Fv = reaktionskraft på centerbord från vattnet 1. Krafter från kite Kiten antas dra med en kraft, Fk, i en vinkel från horisontalplanet och en vinkel från ett plan tvärs båtens längsriktning, se figur 2 och 3 nedan. FL Fk Figur 2. Sidvy 4E1402, Marindesign och 4E1132, Lättviktsdesign Projektdokument, grupp Styrbord Lars Viebke och Benny Sjöbeck Fk cos cos Utvärderingsdokument 17-07-15 2(5) Version 1.0 Fk cos Fk cos cos(90 ) Figur 3. Vy från ovan 2. Momentjämvikt i sidled Sidkrafterna från kite respektive segel måste ge lika stora men motriktade moment om båten skall gå genom vattnet utan att kränga. Ur figur 1 erhålls då följande styrande ekvation (moment kring centerbordets mittpunkt): Fs x Fk y cos cos 0 (1) Ex. 1. Antag att x = 4y och att x = 1200 mm y = 300 mm Fs = 550 N (enl. exempel från ”Optimal kurs” av Fredrik och Joel) 45 30 Fk Fs x 550 1200 3590 N y cos cos 300 cos 45 cos 30 Fk 7 Fs för jämvikt. OBS! Bärplan som genererar negativ lyftkraft krävs – annars flyger båten! Ex. 2. X, y, och som i exempel 1 FL = 100 N (max kraft utan att båten lättar från vattnet) F 100 Fk L 140 N sin sin 45 (2) Fs Fk 20 N 7 (2) 4E1402, Marindesign och 4E1132, Lättviktsdesign Projektdokument, grupp Styrbord Lars Viebke och Benny Sjöbeck Utvärderingsdokument 17-07-15 3(5) Version 1.0 3. Dragkraft Dragkraft från segel och kite summeras för att erhålla den totala dragkraften. Styrande ekvation: Ffram Fsegel Fk cos cos(90 ) (3) Enligt ex. 1 ovan (bärplan krävs): Dragkraft från segel = 245 N enl. exempel från ”Optimal kurs” av Fredrik och Joel. F fram 245 3590 cos 45 cos(90 30 ) N 1514N Enligt ex. 2 ovan: F fram 20 140 cos 45 cos(90 30 ) N 69N 4. Skrovmotstånd Antaganden: Båtens skrov är i princip en plan platta med måtten 3 x 0,5 m. mg = 100N. Båten har en ”anfallsvinkel” i längsled, 4 . en våta arean, S w , utgör 70% av totala arean. Inducerat motstånd, Ri mg tan Friktion, R f qS w C f (4) (5) Totalt skrovmotstånd, R Ri R f (6) Reynolds tal, Re vL (7) där L = våt längd och är vattnets viskositet. 0,075 Fiktionsmotståndskoefficienten, C f (log Re 2) 2 (7) Re 15 0,7 3 31500 10 3 (8) C f 0,075 0,012 (log 31500 2) 2 (8) (4) Ri 100 tan 4 N 7 N (5) R f 112500 0,7 0,5 3 0,012 N 1417 N (6) R 7 1417 N 1424 N ??????????? 4E1402, Marindesign och 4E1132, Lättviktsdesign Projektdokument, grupp Styrbord Lars Viebke och Benny Sjöbeck Utvärderingsdokument 17-07-15 4(5) Version 1.0 Koncept 2 Se figur 4. Denna lösning med lutande segel ger en nedåtriktad kraftkomposant som motverkar kitens lyftkraft. Dessutom är centerbordet utformat som en vinge, vilket ger en kraft som också den har en nedåtriktad kraftkomposant. På så vis kan dragkraften från kiten ökas utan att båten lyfter från vattnet med ett planande skrov utan bärplan. Båtens egentyngd har inte beaktats i jämviktsberäkningarna. Fk cos Figur 4. Vy akterifrån. 1. Momentjämvikt i sidled Sidkrafterna från kite, centerbord och segel måste tillsammans ge ett nollmoment om båten skall gå genom vattnet utan att kränga. Ur figur 4 erhålls då följande styrande ekvation (moment kring centerbordets mittpunkt): Fs x Fk y cos cos 0 (samma uttryck som för koncept 1 ovan) (4) 2. Kraftjämvikt Vertikal kraftjämvikt måste råda. Antag för enkelhets skull att mastens, centerbordets och kite-linans vinklar alla är samma ( i figuren), och att 45 . Detta ger ekvationen : Fk cos 2 Fc 2 Fs 2 0 (5) 4E1402, Marindesign och 4E1132, Lättviktsdesign Projektdokument, grupp Styrbord Lars Viebke och Benny Sjöbeck Utvärderingsdokument 17-07-15 5(5) Version 1.0 (4) och (5) ger tillsammans Fc Fk Fs ( x y ) y Fs x y 1 cos y (6) (7) Ex. 1 Antag att y = 300 mm som i koncept 1 ovan, men att x nu är något kortare, säg x = 1000 mm. Vidare antas liksom i exempel 1 för koncept 1: Fs = 550 N (enl. exempel från ”Optimal kurs” av Fredrik och Joel) 30 (6) Fc 550(1000 300) N 1280 N 300 (7) Fk 550 1000 300 1 N 2100 N 300 cos 30 Fk 4 Fs