Document
advertisement

1
Föreläsning 10:
Stela kroppens plana dynamik (kap 3.13, 4.1-8)
Komihåg 9:
• HO = ("Ixz e x " Iyze y + Iz e z )#˙ (fixt origo, kroppsfix bas)
• H = ("I G e " I G e + I G e )#˙ (kroppsfix bas)
G
!
!
xz
x
yz y
z
z
2
• Steiners sats: IzO = IzG + mdGO
, där dGO är avstånd mellan
axlarna.
• Samband för tunna, plana kroppar: Iz = Ix + Iy
--------!
!
Obalans från tröghetsprodukter
Låt oss betrakta en osymmetrisk plan rotation av en stel
!
kropp kring dess masscentrum. Låt " = #˙e z , så att som
tidigare HG = ("IxzG e x " IyzGe y + IzG e z )#˙ i ett kroppsfixt
koordinat-system med ett fixt G som referenspunkt.
!
!
!
!
Betrakta speciellt ett stelt tvåpartikelsystem i det roterande
xz -planet enligt figuren.
Vi har tröghetsmoment och tröghetsprodukter:
&2 m 2
m#l
G
Iz = 2 % cos " ( = l cos 2 " ,
'
2 $2
4
ml
l
m
IxzG = 2
cos " sin " = l 2 cos " sin " och IyzG = 0 .
22
2
4
!
!
!
2
Insättning i rörelsemängdsmomentet ger i det kroppsfixa
m
systemet: HG = l 2"˙ cos # ($sin # e x + cos # e z ) .
4
Vi ser att vektorn HG pekar längs symmetrilinjen som går
vinkelrät mot massornas sammanbindningslinje och bildar
vinkeln " mot rotationsaxeln.
!
!
Det kraftmoment
som krävs för denna rörelse ges av
!
momentekvationen:
˙ = (H
˙ ) +" #H
MG = H
G
G
G
xyz
!
%
(
m 2˙
m 2 ˙˙
˙x*
= l " cos # ($sin # e x + cos # e z ) + l " cos # '$sin # e{
'
*
4
4
"˙e y )
&
m
= l 2 cos " #$˙˙ sin " e x # $˙ 2 sin " e y + $˙˙ cos " e z .
4
(
!
!
)
!
Konstant rotation
Även för det enklaste fallet av konstant vinkelhastighet
m
krävs ett kraftmoment MG = " l 2#˙ 2 cos $ sin $ e y .
4
Detta kraftmoment kommer uppenbarligen ifrån de lager
som tvingar rotationsaxeln att vara riktad i z -riktningen.
OBS: Ytterligare tvångskrafter i lagren kan tillkomma pga
!
yttre krafter (tyngdkraften)
samt för masscentrums rörelse.
Momentlagar i 3 dimensioner!
˙ O = MO (fix momentpunkt O)
•H
˙ rel
•H
G = M G (allmänt masscentrum)
˙ rel
• (rG " rA ) # ma A + H
A = M A (rörlig momentpunkt)
!
!
!
3
Plan rörelse
Låt den fixa z -axeln vara normal till planet. För att förstå
själva rörelsen behövs bara z -komponenten av
momentekvationen, samt kraftekvationen eller någon
energilag. För att förstå belastning i lager kan fler
!
ekvationer
behövas.
!
- Kraftlag
mx˙˙G = Fx , my˙˙G = Fy
!
!
!
- Viktigaste momentlagarna
d
˙
! IO" = MO (lämpligt fixt origo)
dt
d
IG"˙ = MG (allmänt masscentrum)
dt
( )
( )
- Energiprincipen
1 2 1
mvG + IG" 2 + V = konstant
2
2
OBS: Förenklad beteckning IG " IzG etc används.
!
!
Exempel: • Vad blir IG map rotationsaxeln för de båda
2
massorna i figuren? Svar: IG = 2m(Lsin " ) .
!
!
4
• Vad ger momentlagarna för information om detta system
i det fall att inget yttre moment map z -axeln tillförs?
2
Svar: 2m(Lsin " ) #˙ = konst. Konstantens värde bestäms av
begynnelsetillståndet. Om vi betraktar helt stela system
som roterar kring fix axel gäller
att IG är tidsoberoende
!
d
varför
IG"˙ ) = IG"˙˙ . •
(
!
dt
!
!
Exempel: Betrakta ett icke-roterande ( " = 0 ) rörligt
referenssystem med referenspunkt A . Tolka den generella
˙ rel
‘relativa’ momentlagen: (rG " rA ) # ma A + H
A = M A med
hjälp av begreppet tröghetskraft.
!
!
!
!
Lösning: rG betyder läget för en partikel i inertialsystemet
! r ) betyder det relativa läget i det
och rG " rA (eller
AG
rörliga systemet. Den enda tröghetskraften i A -systemet är
F " #ma A och den verkar på partikeln i rG .
! sp
Tröghetskraftens moment map rA blir rAG " (#ma A ) . Den
!
ursprungliga momentlagen kan alltså
! korrekt skrivas i ett
rel
˙ A = M A + rAG " (#ma A ) , där
rörligt referenssystem som: H
!
högerledet är de ’relativa’ krafternas moment och
!
!
vänstersidan är tidsderivatan av den ’relativa’ rörelsemängdens moment. Denna momentlag kan med denna
tolkning användas!på en stel kropps rörelse.
5
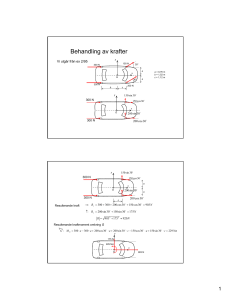
Exempel: En bildörr med massa m har tröghetsmoment I
med avseende på den glatta upphängningsaxeln. Bilen har
konstant (rätlinjig) acceleration a och dörrens
masscentrum har avståndet b ifrån axeln. Bestäm dörrens
!
!
vinkelacceleration som funktion av vinkeln " .
˙˙
Lösning: Vi bestämmer
! " . Vilka krafter finns?? Ingen
fysisk kraft ger kraftmoment med avseende på gångjärnet
!
(ty glatt led), men tröghetskraften "ma A ger ett moment.
!
Rörelsen?? Den
relativa
rörelsen
är
enkel, dvs enkel
!
vridning kring gångjärn. Använd ‘relativ’ momentlag för
˙ rel
rörlig momentpunkt: H
A = M A + rAG " (#ma A ) . Med
!
avseende på en vertikal z -axel (riktad upp ur planet)
genom gångjärnet fås e z : IA"˙˙ = #mabsin" , där IA = I .
Dvs: "˙˙ =!# mba sin" .
I
!
OBS: Hur löser man problemet med hjälp av de andra
! kraft R från
!
momentlagarna??
Måste införa reaktions
gångjärnet och dess moment map masscentrum. Därefter
!
˙ Grel = rGA " R tillsammans med ma = R …osv.
används H
G
!
!
!
6