θ R P et en N SG1102 140604-1 En cirkelrörelse i horisontalplanet
advertisement

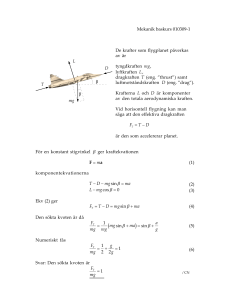
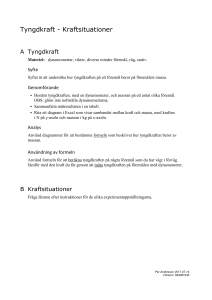
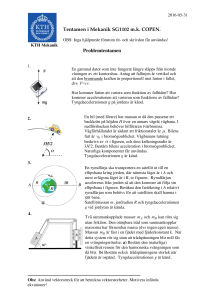
SG1102 140604-1 N R θ en et P En cirkelrörelse i horisontalplanet ska studeras. De krafter som verkar på hylsan är tyngdkraften mg, den konstanta kraften P samt normalkraften från ringen. Normalkraften kan delas upp i en vertikal och en horisontell komponent. Vi inför beteckningen N för den horisontella komponenten. En kraft söks och det är rimligt att anta att kraften skall kunna bestämmas med kraftekvationen. Vi väljer här kraftekvationen F = ma i det naturliga systemet: Här är krökningsradien och Insättning i (1) ger ms˙˙ = Ft 2 s˙ m ρ = Fn (1) ρ=R s = Rθ ⇒ s˙ = Rθ˙ ⇒ ˙˙s = Rθ˙˙ (2) (3) mRθ˙˙ = P cos θ v2 m = N − P sin θ R (4) Normalkraften ges alltså av ekv (4b) om vi bara kan bestämma vänsterledet, dvs i princip farten. Det går att bestämma den med en första integral till (4a) men det är enklare att ställa upp lagen om den mekaniska energins bevarande T + V = T0 + V0 (5) Eftersom P är konstant kan en potentialfunktion bildas på samma sätt som man gör för den konstanta tyngdkraften mg. Vi får alltså 1 mv 2 − PR sin θ = 0 − 0 2 mv 2 = 2 PR sin θ Insättning i ekv (4b) ger resultatet N = 3 P sin θ (6) (7) SG1102 140604-2 Vi delar upp problemet i två delar, stöten och hoptryckningen av fjädern efter stöten. före stöten v0 m AA M omedelbart efter stöten k För stöten gäller att rörelsemängden bevaras för hela systemet kula+säck+ vagn, eftersom det inte finns någon yttre horisontell kraft som kan ändra den. Fjäderkraften är ju noll under stöten. Antag att vagnens hastighet är v1 efter stöten! v1 M+m A maximal fjäderförkortning k v1 = A ⇒ mv0 + 0 = ( M + m)v1 m v0 M+m (1) (2) (3) Detta är vagnens fart omedelbart efter stöten då fjädern fortfarande har sin naturliga längd. Efter stöten gäller att den mekaniska energin bevaras eftersom den enda kraften som gör arbete är fjäderkraften, och den är konservativ. Den maximala förkortningen inträffar då vagnen vänder, dvs då farten är noll: δ M+m Ffjäder pxföre = pxefter k T1 + V1 = T2 + V2 (4) 1 1 ( M + m)v12 + 0 = 0 + kδ 2 2 2 (5) Insättning av sambandet (3) ger 1 m2 1 ⋅ v0 2 = kδ 2 2 M+m 2 ⇒ v0 = k ( M + m) δ m SG1102 140604-3 m b r .. θ b m Vi har en roterande stel kropp samt apan som har en rätlinjig rörelse. Det är naturligt att lösa problemet med momentekvationen men vi testar nu vilken information som lagen om effekten ger. Alltså vi vill lösa problemet med P = T˙ m där effekten är lika med tidsderivatan av kinetiska energin. Varje krafts effekt bestäms med definitionen P = F ⋅ v Tyngdkrafterna på kulorna ger vardera en effekt men tillsammans blir effekten noll eftersom kulornas hastigheter är motriktade. Tyngdkraften på apan ger en effekt och apans hastighet är rθ̇ . Inga andra krafter bidrar till effekten. Kinetiska energin får bidrag från kulorna och apan. Lagen om effekten kan alltså skrivas ( ) d 1 2 ⋅ m bθ˙ mg ⋅ rθ˙ = dt 2 Resultatet är alltså 2 + ( ) 2 1 m rθ˙ 2 ˙ ˙˙ + mr 2θθ ˙ ˙˙ mgrθ˙ = 2mb 2θθ (2) mgr = 2mb 2θ˙˙ + mr 2θ˙˙ (3) θ˙˙ = gr 2b + r 2 2 Kommentar: Om Om (1) b → 0 så bromsar inte de små kulorna och apan faller fritt. r → 0 så finns inget vridande moment. SG1102 140604-4 AA AA Svängningstiden för stångens små svängningar kring det horisontella jämviktsläget skall bestämmas. Låt vinkeln θ vara stångens vridningsvinkel, som alltså är liten. Fjäderns förlängning räknat från jämviktsläget är då bθ . Massans hastighet är cθ̇ . Frilägg kroppen! Den påverkas av tyngdkraften, fjäderkraften och reaktionskraften vid O . I jämviktsläget balanseras tyngdkraftens moment med avseende på O av fjäderkraftens moment. Dessa statiska krafter kan man alltså bortse ifrån i det dynamiska fallet. b kbθ O θ c För att eliminera reaktionskraften i O ställer vi upp momentekvationen ˙ MO = H O (1) som allmänt har z-komponenten Mz = H˙ z (2) Den enda dynamiska kraft som ger moment är fjäderkraftens dynamiska del k bθ . Rörelsemängdsmomentet för plan rörelse i planpolära koordinater är mc 2θ̇ . Alternativt bestäms det som hävarm gånger rörelsemängd c ⋅ mcθ̇ . Insättning i momentekvationen ger −b ⋅ kbθ = ( d mc 2θ˙ dt ) (3) mc 2θ˙˙ + k b 2θ = 0 (4) k b2 θ˙˙ + θ =0 mc 2 (5) Standardekvationen blir Identifiering ger då egenvinkelfrekvensen i kvadrat ωn Perioden är då 2 k b2 = mc 2 τ n = 2π c m b k (6)