Föreläsn 6 Cirkulär rörelse
advertisement

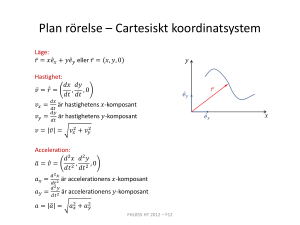
Partikel i cirkulär rörelse – Rörelse i cirkelbana – Rörelse på konstant radie kring ett centrum Vinkelhastighet dθ = θ& = ω dt r θ Rörelsen beskrivs lämpligen med hjälp av ett koordinatsystem n,t med origo i partikeln. t n 1 I koordinatsystemet n,t inför vi de två basvektorerna e~t och e~n . En basvektor har beloppet 1 och i vårt rätvinkliga koordinatsystem är då de båda basvektorerna vinkelräta mot varandra. e~t t 1 ~ en n v~ = v ⋅ ~ et 1 (periferihastighet) 2 ds vt Sträcka längs bågen ds = r ⋅ dθ Periferihastighet (hastighet längs bågen) r vt = dθ ds r ⋅ dθ dθ = =r⋅ dt dt dt Vilket också kan skrivas vt = r ⋅ θ& Eller också vanligt som vt = r ⋅ ω Hastighet och acceleration v~ = v ⋅ e~t (periferihastighet) Acceleration är hastighet deriverad med avseende på tiden d (v ⋅ ~ et ) dv ~ de~ a~ = = ⋅ et + v ⋅ t dt dt dt För att klara denna derivering måste vi utreda vad tidsderivatan av basvektorn blir de~t =? dt 3 Δθ e~t 2 e~t 1 Δθ Basvektorer i tangentiell riktning vid två olika lägen med vinkelskillnad Δθ Δ~ e γ ~ et 2 = e~t1 + Δe~t e~t 1 Δθ Samband mellan basvektorerna i två olika punkter på cirkelbanan När vinkeln Δθ går mot noll blir vinkeln γ rät. 4 de~t = det ⋅ e~n ~ et dθ d e~ t består av en skalär del och en basvektor Betrakta geometrin ovan. Vi ser då också att den skalära delen d~ et = dθ ⋅ e~n Vi kan då skriva Derivatan av detta med avseende på tiden blir då d~ et = det ⋅ e~n det = e~t ⋅ dθ = dθ de~t dθ ~ = ⋅ en dt dt Vi återvänder nu till uttrycket för acceleration vid cirkulär rörelse de~ dv~ d (v ⋅ e~t ) dv ~ a~ = = = ⋅ et + v ⋅ t dt dt dt dt Då vi nu vet att v = r ⋅ de~t dθ ~ dθ och att = ⋅ en kan accelerationen skrivas dt dt dt 2 dv ~ ⎛ dθ ⎞ ~ a~ = ⋅ et + r ⋅ ⎜ ⎟ ⋅ en dt ⎝ dt ⎠ 5 2 dv ~ ⎛ dθ ⎞ ~ a~ = ⋅ et + r ⋅ ⎜ ⎟ ⋅ en dt ⎝ dt ⎠ at Accelerationen består alltså av två delar Tangentialacceleration at = dv dt v ω r Normalacceleration an = r ⋅ ω an 2 Normalacceleration kallas också Centripetalacceleration Cirkulär rörelse – Total acceleration at 2 aTOT = at + a n aTOT r 2 an 6