LINJÄR ALGEBRA OCH GEOMETRI I LEKTION 1 I 1. Linjära
advertisement

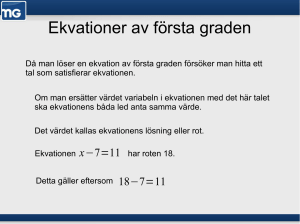
LINJÄR ALGEBRA OCH GEOMETRI I LEKTION 1 JOHAN ASPLUND I 1. Linjära ekvationssystem 1.1. Matriser 2. Vektorer matriser och linjära ekvationssystem 3. Uppgifter Uppgift 1 från dugga 2014-09-27 Uppgift 2 från lektionsplan 1 1 2 3 3 4 1. L I denna kurs är vi ofta intresserade av lösningsmängden till linjära ekvationssystem. Ett exempel på ett linjärt ekvationssystem är a x + a x = b 11 1 12 2 1 a21 x1 + a22 x2 = b2 , (1.1) där a11 , a12 , a21 , a22 , b1 och b2 alla är reella tal, och x1 samt x2 är variabler. Båda dessa ekvationerna separat representerar en linje i planet, och vi kan se på ekvationssystemet som två linjer i ett plan. Det finns då tre olika fall för hur lösningsmängden ser ut. . . . F 1. Figurerna (från vänster till höger) visar att ekvationssysmet (1.1) kan ha en, ingen eller oändligt många lösningar. För att algebraiskt lösa ett ekvationssystem som (1.1) kan vi från tidigare lösa det genom att lösa ut en variabel och stoppa in i den andra ekvationen (substitutionsmetoden). Men detta är opraktiskt så fort antal ekvationer ökar från 2. Istället kommer vi använda oss radoperationer. Dessa innefattar (1) Skala en rad med en konstant (̸= 0). (2) Byta plats på två rader. (3) Addera en multipel av en rad till en annan rad. Dessa rad operationer ändrar inte på själva lösningen som ekvationssystemet har. Den metoden som använder sig av dessa radoperationer för att hitta lösningen till ett ekvationssystem kallas för Gausselimination. 1 2 JOHAN ASPLUND 1.1. Matriser. En matris är en tabell med tal. ··· .. . ··· a11 . A = .. am1 a1n .. . . amn Vi skriver matrisen A som A = (A)ij = (aij ), där indexet i betyder vilken rad vi är på, och j står för vilken kolumn vi är på. Det är vissa former av matriser som är viktigare än andra, och dessa har ofta namn. En viktig typ av element i en matris är ledande element. Ett ledande element i en rad är det första nollskiljda elementet i en rad (om man går från vänster till höger). ( 0 x a11 a12 0 0 y a22 ) . De röda elementen i matrisen ovan påvisar de ledande elementen. En form av matris som är viktig är en trappstegsmatris. En trappstegsmatris är sådan att (1) Alla rader med bara nollor är längst ner. (2) Varje ledande element är längre till höger än det ledande elementet i raden ovanför. 1.1.A. Matrisoperationer. Man kan addera och multiplicera matriser. Låt A = (aij ) och B = (bij ) vara matriser. Addition och skalärmultiplikation sker elementvis! Det vill säga A ± B = (aij ± bij ) kA(kaij ) , eller kanske tydligare a11 · · · . .. A ± B = .. . am1 · · · amn ··· .. . ··· a11 . kA = k .. am1 a1n b11 .. ± .. . . bm1 kam1 b1n a11 + b11 .. .. = . . bmn ··· .. . ··· a1n ka11 .. = .. . . amn ··· .. . ··· am1 + bm1 ··· .. . ··· a1n + b1n .. . amn + bmn ka1n .. . . kamn Matrismultiplikation är lite svårare. Matrismultiplikation definieras inte elementvis. Om A är en (m × r)matris och B är en (r × n)-matris så kan vi definiera AB som en (m × n)-matris. För att matrismultiplikation ens ska vara definierat så måste A ha lika många kolumner som B har rader. Elementet (AB)ij får man som följande. ai1 ··· b1j .. air . = ai1 b1j + · · · + air brj brj Det finns ytterligare en matrisoperation som kallas för transponering. Om A är en (m × n)-matris så är transponatet AT en (n × m)-matris. AT får man genom att helt enkelt byta plats på rader och kolumner i A. 2. V En (n × 1)-matris kallas för en kolumnvektor x1 . x = .. , xn och en (1 × n)-matris kallas för en radvektor. ( x = x1 · · · ) xn . LINJÄR ALGEBRA OCH GEOMETRI I LEKTION 1 3 En del av anledningen till att vi introducerat vektorer och matriser är för att lättare hantera linjära ekvationssystem. Ekvationssystemet a x + a x = b 11 1 12 2 1 a21 x1 + a22 x2 = b2 , ( ) x1 x2 kan skrivas om på matrisform som Ax = b, där x = ( a11 a12 a21 a22 )( x1 x2 ( ) b1 . Det vill säga som b2 och b = ) ( ) b1 b2 = . Detta kan göras mer allmänt med n ekvationer och n obekanta. Ekvationssystemet a11 x1 + · · · + a1n xn = b1 .. . an1 x1 + · · · + ann xn = bn , kan skrivas om på matrisform som ··· .. . ··· a11 . . . an1 b1 x1 a1n .. .. = .. . . . . bn xn ann Ofta när man använder Gausselimination är det en bra idé att skapa en så kallad totalmatris a11 · · · . .. B = (Ab) = . .. an1 · · · a1n .. . ann b1 .. . , bn för att sedan utföra radoperationer på denna. Ett begrepp som är bra, när man ska jämföra två matriser är rangen av en matris. rang(A) = # ledande element efter att A har omformats till en trappstegsmatris genom radoperationer 3. U Uppgift 1 från dugga 2014-09-27. Bestäm lösningarna till ekvationssystemet x1 + 3x2 − x3 = −1 2x + 3x − x3 = 1 1 2 bx + x = 1 2 3 , för alla värden på b ∈ R där lösningar existerar. Lösning. Vi skriver om systemet på matrisform: 1 3 −1 x1 −1 2 3 −1 x2 = 1 . 0 b 1 x3 1 Den motsvarande totalmatrisen är Vi fortsätter med Gausselimination. 1 3 −1 −1 2 3 −1 1 . 0 b 1 1 1 3 −2 1 3 −1 −1 1 3 −1 −1 b 2 3 −1 1 ← ∼ 0 −3 3 3 − + ∼ 0 −3 1 0 0 ← −+ 0 b 1 1 0 b 1 1 −1 1 b+3 3 −1 3 1+b 4 JOHAN ASPLUND Sista ekvationen är då alltså b+3 x3 = b + 1 . 3 Denna ekvationen har en entydig lösning om b ̸= −3. Då får vi b+1 x3 = 3 . b+3 Vi kan sedan lösa den andra ekvationen som b+1 b+1 −2 −3x2 + 3 = 3 ⇔ x2 = −1= . b+3 b+3 b+3 Den första ekvationen blir då b+1 6 b+1 −b − 3 6 b+1 4 6 −3 = −1 ⇔ x1 = −1 + +3 = + + = . x1 − b+3 b+3 b+3 b+3 b+3 b+3 b+3 b+3 Så om b ̸= −3 är den entydiga lösningen x1 4 1 x −2 = 2 b + 3 x3 3b + 3 Uppgift 2 från lektionsplan. Lös ekvationsystemen 2x1 + x2 + 5x3 = 2 och 3x + 2x = 3 2 3 x − x + 2x = 1 1 2 3 2y1 + y2 + 5y3 = 1 3y + 2y = 1 2 3 y − y + 2y = 1 1 2 3 Lösning. Vi tillämpar Gausseliminering på totalmatrisen till det första systemet. . −2 1 −1 2 1 2 1 5 2 ← 1 −1 2 1 − 0 3 2 3 −1 ∼ 0 3 2 3 ∼ 0 3 2 3 2 1 5 2 ← −+ −+ 1 −1 2 1 ← 0 3 1 0 ← − 1 −1 2 1 ∼ 0 3 2 3 . 0 0 −1 −3 Den sista ekvationen är nu −x3 = −3 ⇔ x3 = 3. Sätter vi in detta i andra ekvationen får vi 3x2 + 6 = 3 ⇔ x2 = −1. Sätter vi sedan in detta i första ekvationen får vi x1 + 1 + 6 = 1 ⇔ x1 = −6. Så den entydiga lösningen är x1 −6 x2 = −1 . x3 3 På samma sätt tillämpar vi Gausselimination på totalmatrisen till det andra systemet. −2 2 1 5 1 ← 1 −1 2 1 − 1 −1 2 1 0 3 2 1 −1 ∼ 0 3 2 1 ∼ 0 3 2 1 1 −1 2 1 ← − 2 1 5 1 ← −+ −+ 0 3 1 −1 ← 1 −1 2 1 ∼ 0 3 2 1 . 0 0 −1 −2 På samma sätt som ovan får vi nu E-mail address: [email protected] y1 −4 y2 = −1 . y3 2