Komplexa tal - Matematikcentrum
advertisement

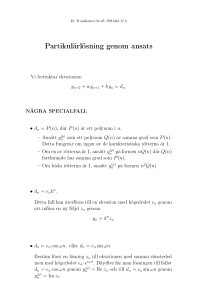
Analys 360 En webbaserad analyskurs Grundbok Om komplexa tal och funktioner Anders Källén MatematikCentrum LTH [email protected] Om komplexa tal och funktioner 1 (11) Introduktion √ De komplexa talen brukar införas genom att man inför i = −1 som en lösning till ekvationen x2 + 1 = 0, och sedan komplexa tal som tal a + bi där a, b är reella tal. Det var dock inte riktigt så behovet av komplexa tal dök upp i historien: de behövdes då man sökte metoder att lösa allmänna tredjegradsekvationer. Vi ska inte följa upp den historiska tråden här, utan istället införa de komplexa talen som talpar (x, y) försedda med en metod att multiplicera sådana. Med det synsättet blir användandet av komplexa tal för att lösa problem som bara involverar reella tal ett kraftfullt hjälpmedel som egentligen inte ändrar problemens natur. Om koordinatsystem i planet Om vi vill beskriva punkter i ett plan i form av reella tal måste vi införa något att relatera punkterna till. För detta behöver vi först en fixpunkt, vilken vi kallar origo och betecknar med 0. Sedan behöver vi ett sätt att relatera en punkt till origo. Ett sätt att göra detta är att införa ett s.k. Cartesiskt koordinatsystem, i vilket vi lägger två koordinataxlar vinkelräta mot varandra genom origo. En punkt anges m.a.p. detta koordinatsystem i sina koordinater (x, y). Vi kan uttrycka detta som att vi kommer till punkten (x, y) från origo genom att förflytta oss enligt vektorn (x, y). En sådan vektor betecknar vi ofta ~u (även om vi med tiden gärna utelämnar pilen) och vi säger då att vektorn ~u har koordinaterna (x, y) och vi ritar den som en pil i talplanet. Sådana förflyttningar kan vi addera genom att göra förflyttningar efter varandra. Vi uttrycker detta som att vi adderar två vektorer ~u1 = (x1 , y1 ) och ~u2 = (x2 , y2 ) till den nya vektorn (x, y) y ~u ~u ~u1 + ~u2 = (x1 + x2 , y1 + y2 ). Detta illustreras i figuren nedan, som också visar att ~u1 + ~u2 = ~u2 + ~u1 . ~u1 + ~u2 ~u1 x ~u2 ~u2 ~u1 Vidare kan vi multiplicera en vektor ~u = (x, y) med ett reellt tal a och få en vektor a~u = (ax, ay) som har samma riktning som ~u, men är a gånger så lång. Om a < 0 betyder detta att vi vänder på riktningen förutom längdkorrigeringen. Men det finns andra sätt att beskriva punkter i planet. Ett ofta använt sätt är att använda polära koordinater, eftersom dessa i många praktiska situationer ofta är mer naturliga än Om komplexa tal och funktioner 2 (11) de Cartesiskt koordinaterna som diskuterades ovan. Referenssystemet för polära koordinater består av origo tillsammans med en stråle från origo (till oändligheten). Har vi dessa kan en godtycklig punkt beskrivas med hjälp av två tal: hur långt r sin θ r det är från origo till punkten, och vilken vinkel θ motsvarande vektor har med referensstrålen. Detta illusteras i vidstående figur, i vilken vi också lagt in ett Cartesiskt koordinatsystem sådant att dess positiva x-axel sammanfaller med det polära koordinatsystemets stråle. Från figuren ser vi att sambandet mellan de två koordinatsystemen är att om en punkt anges av (x, y) i det Cartesiska koordinatsystemet och av (r, θ) i det polära koordinatsystemet, så gäller att x = r cos θ, y = r sin θ. (x, y) r θ r cos θ Anmärkning Vi ser att hjälpvinkelmetoden[1] , som innebar att göra omskrivningen a cos x + b sin x = A sin(x + φ), bygger på att vi inför polära koordinater för punkten (a, b). φ är då vinkeln och A är radien. Vi har sett hur vissa plana kurvor kan beskrivas i Cartesiska koordinater[2] . T.ex. beskrivs enhetscirkeln som x2 + y 2 = 1 medan en rät linje har ekvationen ax + by + c = 0. Men vi kan också skriva dessa i polära koordinater. Eftersom p r = x2 + y 2 , blir ekvationen för enhetscirkeln väldigt enkel, den är helt enkelt r = 1. Ekvationen för en stråle utgående från origo blir också enkel, nämligen θ = θ0 . Anmärkning Däremot blir ekvationen för en allmän rät linje krångligare: r(a cos θ + b sin θ) + c = 0 ⇔ r sin(θ + φ) + d = 0 √ där d = c/ a2 + b2 och φ är den polära vinkeln för (a, b). Geometriskt innebär detta att d är det kortaste avståndet från linjen till origo, medan φ är den vinkel som normalvektorn till linjen har relativt koordinatsystemets referenslinje. Vissa kurvor beskrivs gärna i form av en ekvation där radien bestäms av vinkeln. Vi säger då att kurvan anges på polär form. Om komplexa tal och funktioner 3 (11) Exempel 1 Den kurva som ges av ekvationen r(θ) = 1 + cos θ kallas cardoiden. I varje riktning ligger det en punkt på denna. För θ = 0 får vi punkten (2, 0), för θ = ±π/2 får vi punkterna (0, ±1) och för θ = π får vi origo. Vidare är r(θ) en 2π-periodisk funktion. cos 1+ θ θ En stunds eftertanke visar att kurvan ser ut som i figuren till höger. Det komplexa talplanet Att införa komplexa tal är egentligen samma sak som att införa en multiplikation av talpar, nämligen att (x1 , y2 ) · (x2 , y2 ) = (x1 x2 − y1 y2 , x1 y2 + x2 y1 ). Men det är inte så man brukar göra. Istället inför man komplexa tal så att talet (x, y) svarar mot z = x + iy. Detta innebär att vi skriver (1, 0) som talet 1 och (0, 1) som talet i. Då har vi ju (x, y) = x(1, 0) + y(0, 1) = x + yi. Det innebär att de vanliga lagarna för addition och multiplikation[3] av tal gäller, med det tillägget att i2 = (0, 1) · (0, 1) = (−1, 0). Med andra ord i2 = −1. Multiplicerar vi nu två komplexa tal så har vi att z1 z2 = (x1 + iy1 )(x2 + iy2 ) = x1 x2 + iy1 x2 + ix1 y2 + i2 y1 y2 = x1 x2 − y1 y2 + i(x1 y2 + x2 y1 ), vilket är samma regel vi började avsnittet med att diskutera. För att förstå vad multiplikationen betyder geometriskt inför vi polära koordinater i det komplexa talplanet. Vi börjar då med att skriva punkten (cos θ, sin θ) som det komplexa talet f (θ) = cos θ + i sin θ. Det finns en naturlig beteckning för detta tal som grundar sig på observationen att f 0 (θ) = − sin θ + i cos θ = i(cos θ + i sin θ) = if (θ). Vi ser alltså att f (θ) löser problemet f 0 (θ) = if (θ), f (0) = 1, vilket borde betyda (i varje fall om i hade varit ett reellt tal) att f (θ) = eiθ . Vi inför därför beteckningen/definitionen eiθ = cos θ + i sin θ. Om komplexa tal och funktioner 4 (11) Uttrycket ska alltså vara en exponentialfunktion, och då vill vi att det ska gälla att ei(θ+φ) = eiθ eiφ . Att så är fallet följer av additionsformlerna för sinus- och cosinusfunktionerna: eiθ eiφ = (cos θ + i sin θ)(cos φ + i sin φ) = cos θ cos φ − sin θ sin φ + i(cos θ sin φ + sin θ cos φ). Enligt nämnda additionsformler kan det sista uttrycket skrivas cos(θ + φ) + i sin(θ + φ) = ei(θ+φ) . Additionsformeln för eiθ är därför ekvivalent med additionsformlerna för sinus och cosinus. Att skriva ett komplext tal i polära koordinater blir nu detsamma som att skriva z = reiθ . Talet r betecknas också |z|, kallas absolutbeloppet av z och betyder alltså längden av den vektor som definierar talet (d.v.s. avståndet från origo till punkten). Vinkeln θ kallas för argumentet för z och betecknas arg z. Mutiplicerar vi z med eiφ får vi talet reiθ eiφ = rei(θ+φ) , vilket innebär att eiφ z Att multiplicera ett tal med eiφ betyder geometriskt att vi roterar motsvarande vektor vinkeln φ moturs. z Om vi istället har z1 = r1 eiθ1 , z2 = r2 eiθ2 så ser vi att z1 z2 = r1 r2 ei(θ1 +θ2 ) , φ d.v.s produkten z1 z2 är det komplexa tal som har längden |z1 z2 | = |z1 ||z2 | och argumentet Har vi multiplikation vill vi kunna dividera. För att göra det inför vi först konjugatet av ett tal z = x + iy genom Im z arg(z1 z2 ) = arg z1 + arg z2 . z z̄ = x − iy. Geometriskt innebär det att vi speglar vektorn z i den reella axeln. Konjugatet har den viktiga egenskapen att z z̄ = |z|2 . Re z z̄ Skriver vi på polär form ser vi att om z = reiθ , så gäller att z̄ = re−iθ . Multiplicerar vi ihop dessa får vi att z z̄ = r2 = |z|2 . Vi kan nu lösa ekvationen az = b där a, b är komplexa tal. För att göra detta multiplicerar vi ekvationen med ā, vilket ger |a|2 z = āb. Division med |a|2 ger sedan z. Om komplexa tal och funktioner 5 (11) Exempel 2 För att beräkna talet (1 + i)/(2 − i) förlänger vi med konjugatet till nämnaren: 1+i (1 + i)(2 + i) 2 − 1 + i(2 + 1) 3 1 = = = +i . 2 2 2−i (2 − i)(2 + i) 2 +1 5 5 Låt oss avsluta avsnittet med en kommentar om att beskriva kurvor i planet på polär form. I det komplexa talplanet får en sådan kurva parametriseringen z(θ) = r(θ)eiθ . Det är nu lätt att beräkna dess derivata: z 0 (θ) = r0 (θ)eiθ + r(θ)ieiθ = (r0 (θ) + ir(θ))eiθ . Liksom tidigare är det en vektor som pekar i tangentens riktning. Dess längd ges av p |z 0 (θ)| = |r0 (θ) + ir(θ)| = r0 (θ)2 + r(θ)2 . Denna observation är användbar när vi längre fram ska beräkna längden av kurvor som är givna på polär form. Polynom i komplexa variabler När vi kan multiplicera godtyckliga komplexa tal kan vi också bilda godtyckliga polynom p(z) = n X ak z k k=0 av komplexa tal. Dessa blir då funktioner C → C och en intressant fråga är om det alltid finns lösningar till ekvationen p(z) = w för givet w. Eftersom w är givet kan vi plocka in det i den konstanta termen i polynomet och ställa den viktiga frågan Har ett komplext polynom, som har ett gradtal som är minst ett, alltid ett nollställe? Svaret är ja, ett påstående som går under namnet Algebrans fundamentalsats. Dess bevis är utanför denna kurs[4] . En direkt konsekvens av algebrans fundamentalsats och faktorsatsen[5] (som fungerar lika bra för komplexa polynom) är att vi kan faktorisera ut ett nollställe lika många gånger som gradtalet på polynomet. Varje n:te-gradspolynom har alltså precis n nollställen och vi kan faktorisera det i n förstagradsfaktorer. Att de facto hitta nollställen till ett polynom är dock väsentligen lika svårt som i det reella fallet. Andragradspolynom löses dock ungefär som i det reella fallet: man kvadratkompletterar först. Om komplexa tal och funktioner 6 (11) Exempel 3 För att lösa ekvationen z 2 − (3 − i)z − 10 + 29 = 0, 2 )2 = 12−16i. För att hitta z sätter kvadratkompletterar vi först uttrycket till (z − 3−i 2 vi nu w = z − 3−i . Vi ska då lösa ekvationen 2 w2 = 12 − 16i. Ett analytiskt sätt att göra det på är att skriva w = x + iy. Då blir ekvationen ( x2 − y 2 = 12 x2 − y 2 + 2ixy = 12 − 16i ⇔ . 2xy = −16 Detta är ett ekvationssystem som vi kan lösa, men det finns ett trick som förenklar räkningarna något. Av ekvationen vet vi att |w2 | = |12 − 16i| ⇔ |w|2 = 20 ⇔ x2 + y 2 = 20. Vi har därför tre ekvationer: x2 − y 2 = 12, x2 + y 2 = 20, xy = −8 och här är det lätt att lösa ut x2 och y 2 ur de första två till x2 = 16, y 2 = 4. Det enda vi behöver använda den tredje ekvationen till är att avgöra vilka tecken vi får använda. Eftersom produkten xy ska vara negativ ska x och y har olika tecken och vi får till slut att w = x + iy = ±(4 − 2i). Eftersom z = w + (3 − i)/2, får andragradsekvationen de två lösningarna z1 = 11 5 − i, 2 2 5 3 z2 = − + i. 2 2 Anmärkning Det finns ett geometriskt sätt att lösa ekvationen z 2 = w. Formeln man får är √ w+r z=± r , |w + r| Im z där r = |w|. Förklaringen ges i följande figur: w r φ w+r φ φ Re z Om komplexa tal och funktioner 7 (11) Vi ser här att de tre talen origo, w och w + r bildar en likbent triangel och från det ser vi att de tre vinklarna som är betecknade φ alla är lika stora. Men arg w = 2φ, så argumentet för en lösning z på ekvationen ska vara φ/2. Figuren visar därför att talet w + r har rätt argument, det återstår bara att korrigera längden så att den blir rätt. Vilket är vad som är gjort i formeln ovan. Exempel 4 Vi kan illustrera metoden i anmärkningn ovan genom att lösa den kvadratkompletterade ekvationen från föregående exempel, z 2 = 4(3 − 4i) =√w. Då är r = |w| = 20 och w + r = 32 − 16i = 16(2 − i), varför |w + r| = 16 5. Lösningen ges därför av √ 32 − 16i √ = ±(4 − 2i). z = ± 20 16 5 Ett annat sätt att lösa ekvationen z 2 = w är att bestämma lösningen på polär form. Detta kan göras tämligen enkelt för alla ekvationer på formen z n = w där n är ett positivt heltal. Man löser en sådan ekvation, som kallas en binomisk ekvation, genom att skriva w = aeib och z = reiθ och sätta in det i ekvationen: ( rn = a n inθ ib r e = ae ⇔ . nθ = b + 2kπ Detaljerna överlåtes åt läsaren, men man ser att lösningarna ligger på en cirkel med radien 1 a n och bildar en reguljär n-hörning. Argumentet för ett av hörnen är b/n, och de övriga fås successivt genom rotation vinkeln 2π/n. I figuren har vi lösningarna till ekvationen π π z n = −1 för n = 8, vilka ges av zk = ei( 8 +k 4 ) , k = 0, 1, . . . , 7, som bildar en regelbunden åttahörning. z2 z1 z3 z0 z4 z7 z5 z6 En annan speciell situation som är av intresse är när ett polynom p(z) är sådant att alla dess koefficienter är reella. Då kan man nämligen säga något om dess nollställen, i varje fall de som inte är reella: om ett komplext, icke-reellt, tal är ett nollställe till ett polynom med reella koefficienter gäller att även dess konjugat är ett nollställe. Om komplexa tal och funktioner 8 (11) Sats 1 Om p(z) har reella koefficienter och p(α) = 0, så gäller även att p(ᾱ) = 0. Bevis. 0 = p(α) = p(α) = p(α)[6] . Exempel 5 Polynomet p(z) = z 4 − 2z 3 + 7z 2 + 18z + 26 har nollstället z = −1 + i. Eftersom koefficienterna är reella har det därför också nollstället −1 − i och därmed de två faktorerna (z − (−1 + i)) och (z − (−1 − i). Vi kan därför dela polynomet med (z + 1 − i)(z + 1 + i) = (z + 1)2 + 1 = z 2 + 2z + 2. Kvoten blir, efter polynomdivision, q(z) = z 2 − 4z + 13 = (z − 2)2 + 9, och detta polynom har nollställena 2 ± 3i. Vi ser därför att de fyra nollställena till p(z) är −1 ± i, 2 ± 3i. En konsekvens av att det för ett reellt polynom gäller att alla icke-reella nollställen kommer i par med sitt konjugat, är att det alltid går att faktorisera ett reellt polynom i förstaoch andragradsfaktorer, som följande exempel illustrerar. Exempel 6 Faktorisera polynomet x6 + 1 i andragradsfaktorer. Polynomet har inga reella nollställen, så vi väljer att faktorisera det genom att bestämma alla komplexa nollställen. Det innebär att lösa den binomiska ekvationen z 6 √= eiπ . Lösningarna är zk = eiπ/6+kπ/3 , k = 0, . . . , 5, vilka kan skrivas √ 3 3 i i ±i, ±( 2 + 2 )), ±( 2 + 2 )). Samlar vi ihop de som är komplexkonjugat får vi följande andragradsfaktorer: (z − i)(z + i) = z 2 + 1, √ √ √ √ 3 i 3 i 3 2 1 (z − ( + ))(z − ( − )) = (z − ) + = z 2 − 3z + 1 2 2 2 2 2 4 √ √ √ − 3 i 3 i (z − ( + ))(z − (− − )) = z 2 + 3z + 1. 2 2 2 2 Med andra ord: √ √ z 6 + 1 = (z 2 + 1)(z 2 + 3z + 1)(z 2 − 3z + 1). Om komplexa tal och funktioner 9 (11) Den komplexa exponentialfunktionen Om vi definierar ez = ex eiy , z = x + iy, så får vi från diskussionen ovan att ez1 +z2 = ez1 ez2 . Vi kallar den den komplexa exponentialfunktionen. Den kan ses som en funktion från R2 → R2 om vi vill, men hellre som en funktion C → C. Den har egenskapen att den aldrig blir noll; för att den ska bli noll måste vi hitta ett x sådant att ex = 0, och det vet vi inte går. Med hjälp av den komplexa exponentialfunktionen kan vi också definiera de trigonometriska funktionerna för alla komplexa tal. Vi har nämligen för reella x att eix + e−ix cos x = , 2 eix − e−ix sin x = . 2i Dessa formler kallas Eulers formler och kan användas till mycket. Exempel 7 Vi har att 3 cos x = eix + e−ix 2 3 cos(3x) 3 cos x 1 + . = (e3ix + 3eix + 3e−ix + e−3ix ) = 8 4 4 Exempel 8 (Cosinussatsen) Denna kända sats från trigonometrin säger som bekant att c2 = a2 + b2 − 2ab cos θ där a, b, c är sidorna i en triangel och θ vinkeln mellan a och b. För att bevisa satsen lägger vi en reell tallinje genom sidan a med origo i skärningen mellan sidorna a och b. Då representeras sidan a av det komplexa talet a och sidan b av det komplexa talet beiθ . Följaktligen representeras sidan c av talet a − beiθ . Men då följer att c b θ a c2 = |a − beiθ |2 = (a − beiθ )(a − beiθ ) = (a − beiθ )(a − be−iθ ) = a2 − ab(eiθ + e−iθ ) + b2 eiθ e−iθ = a2 − 2ab cos θ + b2 . Därmed har vi bevisat cosinussatsen. Om komplexa tal och funktioner 10 (11) Den allmänna definitionen av de trigonometriska funktioner för komplexa z blir nu cos z = eiz + e−iz , 2 sin z = eiz − e−iz . 2i Sätter vi här z = ix, ser vi att cos(ix) = cosh(x), sin(ix) = i sinh(x), där ex + e−x , 2 kallas de hyperboliska funktionerna[7] . cosh x = sinh x = ex − e−x 2 Problemet med att definiera komplexa logaritmer Låt oss nu betrakta ekvationen z 2 = w igen, där w är ett givet komplext tal. Vi har då sett att denna ekvation har två lösningar √ √ z1 = reiθ/2 och z2 = reiθ/2+π = −z1 , √ √ där w = reiθ . Om w är ett positivt reellt tal, alltså θ = 0, så blir z1 = w och z2 = − w. √ Det kan nu kännas naturligt att tro√att vi kan definiera en funkton w för godtyckliga komplexa tal w genom att säga att w = z1 . Naturligtvis kan vi göra det, men den funktion vi får blir inte kontinuerlig i hela det komplexa √ talplanet. T.ex gäller enligt denna definition att 1√= 1, och vi man ser lätt att om > 0, så gäller att 1 + i → 1 då → 0. Detta därför att argumentet för 1 + går mot noll då → 0. √ Däremot gäller att 1 − i → −1. Vi har nämligen att 1 − i har ett argument θ som går mot 2π då → 0, vilket betyder att z1 = eiθ → eiπ = −1 då → 0. w = reiθ/2 z = reiθ θ w= √ r r √ w=− r √ Vi kan alltså inte på detta sätt definiera en kontinuerlig funktion : C → C. Men om √ vi skär bort den positiva reella axeln och definierar rotfunktionen på resten, får vi en kontinuerlig funktion där den är definierad. Priset är att vi kan inte dra roten ur positiva tal! Men vi måste inte skära bort just den positiva reella axeln, vi kan skära bort vilken stråle som utgår från origo som vi vill och definiera en rotfunktion på resten. När man gör [8] sådana val säger man att man väljer gren √ av rot-funktionen. Det gör att man kan inte utan vidare skriva ut ett uttryck som 3 − 4i – det är i allmänhet inte klart vad man menar med det. √ Skriv inte z för ett icke-reellt, komplext, tal z, om du inte är väldigt tydlig med vad du menar! Om komplexa tal och funktioner 11 (11) Samma problem har vi när vi försöker definiera en logaritmfunktion av komplexa tal. En sådan ska vara lösningen på ekvationen ez = w. Igen kan det verka gå bra från början: skriv w = reiθ = eln r+iθ . Ekvationen löses då av alla tal zk = ln r + i(θ + 2kπ) = ln |z| + i(arg z + 2kπ), där k är ett heltal. Det finns alltså oändligt många lösningar. Låt oss bestämma oss för att vi tar k = 0. Om vi, liksom ovan, närmar oss den positiva reella axeln från ovan, så gäller att z → ln r, medan om vi närmar oss den nerifrån så gäller att z → ln r + 2πi. Samma problem som ovan, och lösningen blir samma som ovan: vi kan bara definiera logaritmfunktionen i planet minus en stråle. Om man väljer att skära bort den positiva reella axeln kan vi inte beräkna logaritmen av positiva tal, så man skär ofta bort den negativa reella axeln istället: och kan då inte beräkna logaritmen av negativa reella tal. Olika val av stråle att skära bort leder till olika logaritmfunktioner. Eller grenar av logaritmfunktionen, som man säger. Den här diskussionen fortsätts i den komplexa analysen[9] , men budskapet är att att man inte utan vidare kan beräkna logaritmen av t.ex. negativa, reella, tal. Resultatet beror av vilken gren av logaritmen man väljer att arbeta med. Noteringar 1. Se kapitlet Om de trigonometriska funktionerna 2. Se kapitlet Om de trigonometriska funktionerna 3. Dvs de kommutativa lagarna x + y = y + x, xy = yx, de associativa lagarna (x + y) + z = x + (y + z), (xy)z = x(yz) och den distributiva lagen x(y + z) = xy + xz. 4. Se dock kapitlet Ett bevis för algebrans fundamentalsats för ett intuitivt enkelt bevis. 5. Se t.ex. kapitlet Analys av polynomfunktioner 6. Skriv ut beviset ordentligt med p(z) = a0 + a1 z + . . . + an z n , så ser du vad som händer i de olika likheterna. 7. För mer om dessa funktioner, se kapitlet Om trigonometriska och hyperboliska funktioner. 8. Man kan alternativt tänka på rot-funktionen som en flervärd funktion, men vi låter denna diskussion tillhöra den komplexa analysen. 9. Se t.ex. artikeln Vad är Riemannytor och vad är de bra till?