2 NEWTONS LAGAR
advertisement

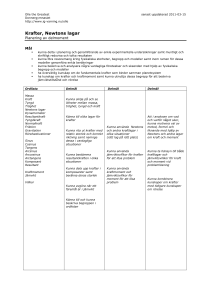
Newtons lagar 2 NEWTONS LAGAR 2.1 Inledning Ordet kinetik används ofta för att beteckna läran om kroppars rörelse under inflytande av krafter. Med dynamik betcknar vi ett vidare område där även kinematiken ingår. I kinematiken i föregående avsnitt presenterades några metoder att matematiskt beskriva rörelse. Vi definierade begreppen hastighet och acceleration, och beskrev dessa m h a vektorer. De grundläggande begreppen för kinematiken var tiden, rummet och punkten. I detta avsnitt skall vi introducera Newtons lagar och besvara frågor som • Varför rör sig kroppen som den gör? • Hur rör sig kroppen när den påverkas av krafter? Att förstå Newtons lagar är en ganska lätt uppgift. Dessa är enkla att skriva upp och är inte särskilt komplexa. Deras enkelhet är emellertid skenbar. De kombinerar definitioner, observationer från naturen, delvis intuitiva begrepp, och några antaganden om rummets och tidens egenskaper. Newtons lagar är inte självklara. I Aristoteles idevärld, antogs att man behövde en kraft för att få en kropp i likformig rörelse. Denna idé accepterades i tusentals år eftersom den ansågs intuitivt korrekt. Det är viktigt att förstå vilka delar av Newtons lagar som är baserade på experiment och vilka delar som är definitioner. 2.1.1 Newtons första lag 2–1 För att beskriva rörelse måste vi introducera ett koordinatsystem, och tröghetslagen kan även uttryckas m h a begreppet inertialsystem. • Med ett inertialsystem förstås ett koordinatsystem i vilket en isolerad kropp (vilken ej påverkas av några krafter) rör sig med konstant hastighet längs en rät linje. Valet av inertialsystem beror på problemet. Ibland kan ett system fixt i jorden tjäna som ett inertialsystem. För astronomiska objekt kan man använda ett system fixt i universums tyngdpunkt. Ett inertialsystem kan röra sig med konstant hastighet i förhållande till ett annat system. • Det är alltid möjligt att finna koordinatsystem i vilket en isolerad kropp rör sig längs en rät linje 2.1.2 Newtons andra lag Antag att vi drar en kropp med ett snöre längs ett friktionsfritt bord. Kroppen kommer då att accelerera, med konstant acceleration. Om vi ersätter kroppen med en annan större eller mindre kropp kommer accelerationen att ändras. Accelerationen beror på en egenskap hos kroppen, vilket vi kallar massa. m -S Om vi antar att den första kroppen har Newtons första lag kallas även tröghetslagen massan m1 så får vi och kan formuleras på följande sätt: m2 = m1 a1 /a2 1. Tröghetslagen En kropp förblir i sitt tillstånd av vila eller likformig rörelse om För andra kroppar med olika massor får vi den inte av verkande krafter tvingas att ändra detta tillstånd. mk = m1 a1 /ak Newtons lagar 2–2 Det visar sig experimentellt att a1 /ak blir 3. Reaktionslagen oberoende av hur vi åstadkommer accelerTvå kroppars ömsesidiga verkningar på ationen dvs mk /m1 är också lika. Massa varandra är alltid lika stora och riktade definierad på detta sätt är alltså en inneåt motsatt håll. boende egenskap hos den kropp vi accelererar. Detta innebär att • Massan hos en kropp är ett mått på motståndet hos kroppen för rörelseändring. • krafter mellan kroppar uppträder alltid När vi drar i snöret påverkar vi kroppen med en kraft och detta leder till en acceleration a. Accelerationen vilken är följden av flera krafter är vektorsumman av accelerationerna producerade av varje enskild kraft separat. Newtons andra lag, eller accelerationslagen, uttrycker proportionalitet mellan kraft och acceleration 2. Accelerationslagen En kropp som påverkas av kraften F får en acceleration a sådan att F = ma där konstanten m är kroppens (tröga) massa. Om kroppen påverkas av flera krafter har vi ma = X i m ai = X Fi = F i • Krafter uppstår från växelverkan mellan system eller kroppar. Det är denna växelverkan vilken är fysikaliskt relevant och orsakar krafter. • En isolerad kropp växelverkar inte med andra kroppar och påverkas inte av några krafter. I praktiken avtar växelverkan med avståndet r mellan kropparna. Gravitationskraften och Coulombkraften dör ut som 1/r 2 . De flesta krafter avtar mycket fortare t ex som 1/r 7 . 2.1.3 Newtons tredje lag Att en kraft är resultatet av växelverkan mellan två system uttrycks explicit i Newtons tredje lag (reaktionslagen), vilken lyder: parvis. • Om en kropp b utövar en kraft F ab på en kropp a då måste det finnas en kreft F ba vilken verkar på kropp b från a. Newtons tredje lag säger att F ba = −F ab . - '$ &% b a F ab F ba En kraft utan en motsvarande motkraft existerar inte. Detta uttrycker egentligen konservering av rörelsemängd. Newtons tredje lag kan användas för att utröna om en kropp är isolerad eller inte. Om en kropp accelereras av en yttre kraft, då måste det finnas en lika och motriktad kraft på en annan kropp. Newtons andra lag F = ma gäller endast i ett inertialsystem. Existensen av inertialsystem är ej trivialt. Låt oss betrakta två olika koordinatsystem och låt r(t) och r 0 (t) beteckna lägevektorerna till en kropp. 0 z H Y HHHr (t) 6 r(t) HHH z 1 6 y R(t) x -y 0 0 x Då är r(t) = r0 (t) + R(t) 0 Newtons lagar 2–3 antag att xyz-systemet är ett inertialsystem Speciellt gäller att för att förstå rörelser i där Newtons andra lag gäller, dvs planetsystemet kan jordens yta inte användas som referenspunkt. Däremot gäller att för ma(t) = F . fenomen på jordytan är ett koordinatsystem Men från sambandet mellan koordinaterna får fixt i jordytan approximativt ett inertialsystem. vi a(t) = a0 (t) + A(t) där A(t) betecknar accelerationen för det pri- 2.2 made systemets origo, dvs Tillämpningar på Newtons lagar. ma0 (t) = F − mA(t) För att lösa problem med användning av Newtons lagar bör man arbeta enligt följande Om A(t) = 0 ser vi att även x0 y 0 z 0 är ett schema. inertialsystem, dvs ett system vilket rör sig likformigt m a p ett annat inertialsystem är 1. Frilägg ett system i sina beståndsdelar, också ett inertialsystem. dvs behandla varje kropp som ingår i Ibland vill vi använda ett icke-inertialproblemet för sig. system. Vi kan då införa fiktivkrafter där F app = F + F f iktiv med F f iktiv = −mA(t) Fiktiva krafter är användbara i vissa fall, men måste användas med försiktighet. Att inertialsystem existerar där Newtons lag håller bevisas av att dessa lagar kan förutsäga planeters banor i solsystemet med hög precision. Koordinatsystemet i detta fall är Kopernikus system med solen och stjärnorna som fixa referenspunkter. Framgången med den mekaniska teorin för planetbanorna är ett av det bästa beviset på att Newtons lagar är korrekta. Vi säger därför att systemet med origo i solens centrum är ett inertialsystem. Astronomiska tester av mekanikens lagar är överlägsna laboratorieexperiment. Dels kan planeternas rörelse fastslås med hög precision, dels är kraftlagen känd, och dels har planeterna observerats under 4000 år. Nu vet vi att vår galax roterar kring sitt centrum. Det innebär att solen är accelererad m a p galaxcentrat. Denna acceleration är ca 10−7 av jordens acceleration relativt solen. Om vi därför är intresserade av rotationen i vår galax måste vi lägga ett koordinatsystem i galaxens centrum, vilket då blir ett inertialsystem för denna rörelse. 2. Rita ut alla krafter vilka verkar på de olika kropparna. 3. Inför ett koordinatsystem, och ställ upp rörelseekvationerna. 4. Identifiera krafter och motkrafter 5. Inför eventuella tvång och randvillkor. Enligt Newtons lagar är det endast krafter vilka verkar på en kropp vilka påverkar dess rörelse. Krafter från en kropp på andra kroppar påverkar de senares rörelse, men inte kroppen själv. Ex 2.3 Tre godsvagnar med massan M dras med en kraft F av ett tåg. Friktionen är försumbar. Finn krafterna på varje vagn. För system vilka består av flera kroppar är accelerationerna ofta relaterade av tvångsvillkor. Tvångsekvationerna kan ofta finnas genom inspektion, men ofta måste man göra ett geometriskt resonemang. Ex 2.4 Två massor är förbundna med ett rep över en trissa vilken accelerar uppåt med accelerationen A. Beräkna accelerationen för de båda massorna. Newtons lagar 2.3 Fysikens kraftlagar. Att förutsäga rörelsen från kända kraftlagar är en viktig del av fysiken och dess tillämpningar. Det är också väsentligt att härleda den kraft vilken orsakar en viss rörelse. Ett exempel är Newtons härledning av gravitationslagen från Keplers lagar för planetrörelserna. Så vitt vi vet finns det endast fyra fundamentalt skilda typer av växelverkan i universum: • gravitation • elektromagnetisk växelverkan • svag växelverkan • stark växelverkan Gravitationen och den elektromagnetiska växelverkan kan verka över långa avstånd eftersom de avtar som 1/r 2 . Gravitationen är emellertid alltid attraktiv medans elektriska krafter kan vara både attraktiva och repulsiva. I stora system tar de elektriska krafterna ut varandra och endast gravitationen återstår. Av detta skäl dominerar gravitationen den kosmiska skalan i universum. I motsats till detta är världen i vår närhet dominerad av elektriska krafter, eftersom de är mycket starkare än gravitationen på en atomistisk skala. Elektriska krafter bestämmer atomernas och molekylernas och mera komplexa systems struktur. Den svaga och starka växelverkan har sådan kort räckvidd att de är betydelsefulla endast på kärnavstånd 10−15 m. De är försumbara på atomavstånd 10−10 m. Den starka växelverkan är starkare än den elektromagnetiska växelverkan på kärnavstånd. Den är det klister vilken binder samman atomkärnan. 2–4 till mekanikens utveckling. Denna lag upptäcktes av Newton år 1666. Betrakta två partiklar a och b med massor Ma och Mb på avståndet r från varandra. Låt F ba vara kraften på b från a och F ab kraften på a från b, då är F ab = −F ba och GMa Mb |F ab | = |F ba | = r2 där G är gravitationskonstanten G = 6.67 × 10−11 Nm2 /kg2 Gravitationskraften är en centralkraft dvs riktad längs sammanbindningslinjen mellan massorna GMa Mb F ba = − r̂ ba ; r̂ba = rba /r r2 rba = rb − ra ; r = |rba | Betrakta nu partikel b. Dess rörelseekvation blir GMa Mb GMa Mb ab = − r̂ ba ; ab = − 2 r̂ba 2 r r dvs accelerationen för partikel b är oberoende av dess massa. Detta följer av antagandet att mtrög = mtung dvs att massan i Newtons andra lag är densamma som i gravitationslagen. Man kan visa att för kraften från jorden på en kropp utanför jordytan på avståndet r från jordens centrum gäller GMe m F =− r̂ ; r > Re r2 där Me är jordens massa och Re dess radie. På jordens yta är r = Re och accelerationen på kroppen blir i detta fall GMe a = F /m = − 2 r̂ = −gr̂ = g Re där g är tyngdaccelerationen g = 9.8 m/s2. Tyngdaccelerationen minskar med höjden över jordytan, och vi har g(r) = GMe /r 2 . Vi definierar tyngden (weight) av en kropp nära jordytan som den gravitationskraft 2.3.1 Gravitation, tyngd vilken utövas av jorden. På jordytan blir Gravitationen är den mest kända av de funda- tyngden W = mg mentala kraftlagarna, och är nära förbunden Newtons lagar 2.3.2 2–5 Gravitationsfält Gravitationskraften på partikel b från partikel a är GMa Mb F ba = − r̂ba r2 Kvoten F ba /Mb kallas gravitationsfältet från Ma. Vi har G= F ba Mb =− GMa r̂ba r2 • viskositet mellan en kropp och en vätska. Dessa krafter kan nu förklaras via fundamentala egenskaper hos materien. Ex 2.10 Betrakta ett block med massa M vilket dras av ett snöre med massa m, med en kraft F . Vilken kraft påverkar blocket från snöret? 0 F1 F1 F m I allmänhet om gravitationsfältet i en M punkt i rummet är G, så blir gravitationskraften på en massa M i den punkten F = M G. Gravitationsfältet har dimension Vi börjar med att frilägga blocket och acceleration, dvs accelerationen på en massa snöret och ritar ut alla krafter på dessa. M blir M a = M G, eller a = G. På jorden är Rörelsen sker i en dimension. Vi har då Newgravitationsfältet g . tons ekvationer för blocket och snöret 2.3.3 Elektrostatisk kraft. - M aM = F1 ; - mas = F − F10 Den elektrostatiska kraften F ba på en Eftersom snöret och massan rör sig som en laddning qb från en laddning qa ges av kropp måste aM = as = a, och från NewCoulombs lag tons tredje lag gäller F1 = F10 . Vilket ger accelerationen a = F/(M + m). Detta ger qa qb F ba = k 2 r̂ba F1 = M/(M + m)F ≈ F om m ≈ 0. r Vi tänker oss snöret som sammansatt av Om qa och qb har samma tecken är kraften små sektioner vilka växelverkar via kontaktrepulsiv och om de har olika tecken är kraften krafter. Varje del drar de närliggande deattraktiv. larna och dras själv av dessa. Storleken Analogt med gravitationsfältet kan vi på krafterna mellan de olika delarna kallas definiera det elektriska fältet E som den elek- spänning. Ett rep kan vara under stark triska kraften på en kropp delat med dess spänning. Om spänningen är likformig så laddning. Det elektriska fältet i punkten r blir kraften på varje del noll och delen är i p g a en laddning q i origo är alltså jämvikt. I allmänhet kan spänningen variera längs repet, om detta t ex är accelererat. q E = k 2 r̂ r 2.3.5 Spänning och atomistiska 2.3.4 Kontaktkrafter krafter Med kontaktkrafter menar vi krafter vilka överförs mellan kroppar via kortverkande atomistiska eller molekylära växelverkningar. Exempel är • snörkrafter, • friktionskrafter vid glidning Kraften på varje element av repet är i jämvikt noll. Om spänningen blir för stor kommer repet att brista. Vi kan kvalitativt förstå detta genom att betrakta repet från en atomistisk utgångspunkt. I en idealiserad modell av repet har vi en endimensionell kedja av molekyler. Antag att Newtons lagar 2–6 kraften F verkar på molekyl 1 i ena ändan av repet. Kraftdiagrammet för molekyl 1 och 2 blir 0.2 0.15 0.1 | | F • -F 1 0 F0 • -F 2 00 F 00 • -F 000 3 F(r) 0.05 2.3.6 Normal- och friktionskrafter Kraften från en yta på en kropp i kontakt med ytan kan delas upp i två komponenter, en vinkelrät mot ytan och en tangentiell till ytan. Den vinkelräta kraften kallas normalkraft och den tangentiella friktionskraft. Normalkraften har samma ursprung som spänningen i ett snöre. När vi lägger en kropp på en yta, t ex ett bord, kommer molekylerna | | 0 | | −0.05 | r0 r2 | | −0.1 I jämvikt är F = F 0 , F 0 = F 00 dvs F 00 = F , F 000 = F etc. Vi ser att snöret förmedlar kraften F . För att förstå hur detta sker, behöver vi titta på naturen hos de interatomistiska krafterna. Kvalitativt beror kraften på avståndet r mellan två atomer eller molekyler. För små avstånd är kraften repulsiv. Den blir noll för r = r0 och är attraktiv för r > r0 . För stora värden på r avtar kraften till noll. Här är r0 ≈ 3 × 10−10 m. När det inte finns någon yttre kraft F så ligger molekylerna på avståndet r0 från varandra. I annat fall skulle de intermolekylära krafterna leda till att repet tänjes eller drar ihop sig. När vi drar i repet till r = r2 blir kraften attraktiv och balanserar precis den yttre kraften så att den totala kraften på varje molekyl blir noll. Om snöret vore stelt som en metallstång kunde vi trycka ihop det till r = r1 där kraften blir repulsiv, och åter balanserar den yttre kraften. Ändringen i längden beror på lutningen av kurvan i r0 . Den attraktiva intermolekylära kraften har ett maximum vid F max . Om den yttre kraften är större än F max kommer snöret att brista. | r1 | | −0.15 −0.2 0.8 1 1.2 1.4 1.6 1.8 2 r i kroppen att utöva en nedåtriktad kraft på molekylerna i bordet. Molekylerna i bordet rör sig nedåt tills repulsionen från molekylerna i lagren nedanför balanserar den yttre kraften. Normalkraften N är motriktad till resultanten till alla krafter på ytan. Friktion uppkommer när ytan av en kropp rör sig över ytan av en annan kropp. Storleken på friktionen beror på ytans egenskaper och den relativa hastigheten. Friktionen är alltid motriktad den rörelse vilken skulle äga rum om friktionen inte fanns. För många ytor får man |F | ≤ f |N | där N är normalkraften och f är friktionskoefficienten eller friktionstalet. När en kropp rör sig över en yta är friktionskraften riktad motsatt den instantana hastigheten och har storleken f N . 2.3.7 Hookes lag, fjäderkraft Utsträckningen av en fjäder är proportionell mot kraften Fs = −kx där k är en konstant kallad fjäderkonstanten och x är fjäderns förlängning från jämviktsläget. Det negativa tecknet innebär att Fs alltid försöker återställa fjädern till jämvikt. En kraft vilken uppfyller Hookes lag kallas en linjärt elastisk kraft. Hookes lag bryter samman vid stora förlängningar av fjädern. Newtons lagar 2.3.8 2–7 Viskositet En kropp vilken rör sig genom en vätska eller en gas bromsas av krafter från viskositeten hos vätskan. Till skillnad från friktionskrafter har viskösa krafter ett enkelt hastighetsberoende och är proportionella mot kroppens hastighet. Viskositet uppstår eftersom en kropp vilken rör sig i ett medium påverkar detta med krafter vilka försöker motverka rörelsen. Från Newtons tredje lag utövar vätskan en reaktionskraft på kroppen. Vi kan skriva den viskösa kraften som F v = −C v där C är en konstant vilken beror på vätskan och kroppens form. Rörelseekvationen blir m Nu är dv = −C v dt dv dv̂ dv v̂ + v = dt dt dt eller m dv dv̂ dv v̂ + mv = = −Cvv̂ dt dt dt Eftersom v̂ är en enhetsvektor är v̂˙ vinkelrät mot v̂ , dvs dv m = −Cv dt vilket ger lösningen v(t) = v0 e−(C/m)t