mekanik I, 140825-1 Frilägg hjulet och den lätta stången! Hjulet
advertisement

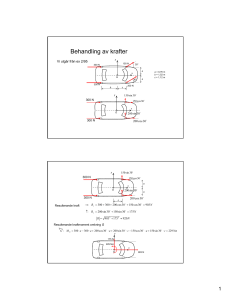
mekanik I, 140825-1 AA A AA A a b B N c f f N P r O Frilägg hjulet och den lätta stången! Hjulet påverkas av kontaktkraften vid bromsklossen, kraftparsmomentet M samt tyngdkraften och reaktionskraften vid axeln O . Den yttre pålagda kraften P och kontaktkraften vid bromsklossen ger upphov till en reaktionskraft på stången i A . Här ska vi bestämma krafternas storlek i gränsfallet mot glidning då friktionskraften vid bromsklossen uppnått sitt maximala värde. M Den enda möjligheten att undkomma reaktionskrafterna som ej efterfrågas är att utnyttja momentekvationer. Jämvikt fordrar för: stången hjulet A : O: N ⋅b − P⋅a − f ⋅c = 0 (1) M − f ⋅r = 0 (2) Friktionsvillkoret vid kontaktytan är f ≤ µN ⇒ fmax = µN ⇒ N= fmax µ (3) Den minsta kraft P som krävs bestäms för det fall då friktionskraften är maximal. Insättning av ekv (3) i (1) ger fmax ⋅ b − P ⋅ a − fmax ⋅ c = 0 µ (4) Insättning av ekv (2) i (4) ger M M ⋅b − P⋅a − ⋅c = 0 r µr ⇒ M 1 M P= ⋅b − P⋅a − ⋅c aµ r r ⇒ P= M (b − µc) a rµ mekanik I 140825-2 N l O x AA µN A kx Rätblocket släpps från vila då fjäderförlängningen är noll dvs då fjädern har sin naturliga längd l. Lägg en xaxel med origo i utgångsläget så att koordinaten x betyder rätblockets förflyttning och alltså också fjäderförlängningen. Begynnelsevillkoret kan skrivas x = 0 t=0 v x = 0 β mg De krafter som verkar på rätblocket är tyngdkraften mg, fjäderkraften kx, normalkraften N och friktionskraften, som vid glidning är fullt utbildad och kan skrivas µN . Den maximala fjäderförlängningen fås då rätblocket stannar eller vänder i nedersta läget, dvs då farten är noll. Eftersom en energiekvation i princip ger sambandet mellan fart och läge ställer vi upp en sådan. Då friktionskraften ej är konservativ väljer vi lagen om den kinetiska energin: U = T − T0 (1) som säger att det totala arbetet för att nå ett visst läge är lika med ändringen i kinetisk energi. Insättning ger: 1 1 − kx 2 − µmg cos β ⋅ x + mg sin β ⋅ x = mv 2 + 0 2 2 (2) Tyngdkraften och friktionskraften är konstanta så att arbetet bestäms som kraften i vägens riktning gånger förflyttningen. Tyngdkraftens komponent i x-riktningen är mg sin β . Fjäderkraftens arbete beräknas med en integral och blir negativt då fjäderkraften är motriktad förflyttningen. Insättning av v = 0 ger 1 − kx 2 − µmg cos β ⋅ x + mg sin β ⋅ x = 0 (3) 2 Ekvationen har två lösningar. Den ena är x = 0 . Den andra ges av 1 − kx1 − µmg cos β + mg sin β = 0 2 2mg x1 = (sin β − µ cos β ) k eller x1 = 2mg cos β (tan β − µ ) k (4) mekanik I 140825-3 N R θ en et P En cirkelrörelse i horisontalplanet ska studeras. De krafter som verkar på hylsan är tyngdkraften mg, den konstanta kraften P samt normalkraften från ringen. Normalkraften kan delas upp i en vertikal och en horisontell komponent. Vi inför beteckningen N för den horisontella komponenten. En kraft söks och det är rimligt att anta att kraften skall kunna bestämmas med kraftekvationen. Vi väljer här kraftekvationen F = ma i det naturliga systemet: Här är krökningsradien och Insättning i (1) ger ms˙˙ = Ft 2 s˙ m ρ = Fn (1) ρ=R s = Rθ ⇒ s˙ = Rθ˙ ⇒ ˙˙s = Rθ˙˙ (2) (3) mRθ˙˙ = P cos θ v2 m = N − P sin θ R (4) Normalkraften ges alltså av ekv (4b) om vi bara kan bestämma vänsterledet, dvs i princip farten. Det går att bestämma den med en första integral till (4a) men det är enklare att ställa upp lagen om den mekaniska energins bevarande T + V = T0 + V0 (5) Eftersom P är konstant kan en potentialfunktion bildas på samma sätt som man gör för den konstanta tyngdkraften mg. Vi får alltså 1 mv 2 − PR sin θ = 0 − 0 2 mv 2 = 2 PR sin θ Insättning i ekv (4b) ger resultatet N = 3 P sin θ (6) (7) mekanik I, 140825-4 v1 r1 β A Den enda kraft som verkar på farkosten är gravitationskraften. Verkningslinjen för den går genom jordens centrum och därför är kraftmomentet med avseende på jordens centrum noll. Detta betyder enligt momentekvationen v0 ˙ MO = H O R att rörelsemängdsmomentet är en rörelsekonstant: r1mv1 = Rmv0 cos β (1) Gravitationskraften är konservativ, vilket betyder att den mekaniska energin bevaras: T1 + V1 = T0 + V0 1 R2 1 R2 mv12 − mg = mv0 2 − mg 2 2 r1 R (2) Nu vet vi att r1 = 3 R/2 och v0 = 3 gR/2 (3) Ekv (1) ger då 3 1 3 gR cos β ⇒ v1 = 2 2 v1 = 1 3 gR cos β 3 (4) Dividera ekv (2) med m/2 och sätt in sambanden (3) och (4)! 2 2R 1 3 gR cos β − 2 g = v0 2 − 2 gR 3 3R (5) 1 3 2 gR cos 2 β = gR − gR 3 4 3 (6) cos 2 β = 1 4 ⇒ ⇒ 2 cos β = ± β = 60° 1 2