LUNDS TEKNISKA HÖGSKOLA TENTAMENSSKRIVNING
advertisement

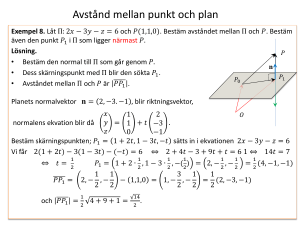
LUNDS TEKNISKA HÖGSKOLA MATEMATIK LUNDS TEKNISKA HÖGSKOLA MATEMATIK TENTAMENSSKRIVNING Linjär algebra 2012 -- 04 -- 13, kl. 8 -- 13 INGA HJÄLPMEDEL. Lösningarna skall vara försedda med ordentliga och tydliga motiveringar. Ge tydliga svar där så är möjligt. Om inget annat anges är koordinatsystemen ortonormerade och positivt orienterande. 1. Lös för alla värden på 𝑎 det homogena ekvationssystemet ⎧ ⎨ (𝑎 + 1) 𝑥 + 2 𝑦 + 𝑧 = 0 −𝑥 + 𝑎 𝑦 − 𝑧 = 0 ⎩ 𝑥 + 4𝑦 + 𝑧 = 0 . 2. Ange skärningspunkten mellan linjerna ⎧ ⎨ 𝑥 = 1 − 2𝑡 𝑦 = 2 + 3𝑡 och ⎩ 𝑧 = 3 − 4𝑡 4. Bestäm en bas för nollrummet för matrisen ⎛ ⎞ 1 1 3 −1 𝐴 = ⎝ 1 2 1 1 ⎠. 2 4 2 2 Ange också rang och nolldimension för matrisen. 5. Låt ⎞ 1 2 2 𝐴 = ⎝ 1 1 3 ⎠. 1 −1 5 ⎛ Bestäm en inverterbar matris 𝑆 och en diagonalmatris 𝐷 sådan att 𝑆 −1 𝐴𝑆 = 𝐷. 6. Låt F och G vara två linjära avbildningar från ℝ3 till ℝ3 , där F är avbildningen "vridning vinkeln 𝜋2 i positiv led kring 𝑧-axeln". Antag att den sammansatta linjära avbildningen H = G ∘ F överför de tre vektorerna u1 = (1, 1, 0), u2 = (0, 1, 0), på vektorerna w1 = (1, 2, 3), w2 = (−1, 1, 0) Bestäm avbildningsmatrisen för G . 1. Bestäm, för varje reellt tal s, lösningarna till det homogena ekvationssystemet BX = 0 där 1 1 s−1 x1 0 0 B= s−2 0 , X = x2 , och 0 = 0 . 2 s 2 x3 0 3. Definiera egenvärde och egenvektor till en matris. Vad menas med att en matris är diagonaliserbar? Diagonalisera matrisen 1 4 2 . A= 5 1 3 Bestäm en ekvation på affin form för det plan som innehåller båda linjerna. b) Låt 𝐶 och 𝐷 vara två inverterbara matriser av samma typ. Visa likheten ( )−1 𝐶𝐷 = 𝐷−1 𝐶 −1 . INGA HJÄLPMEDEL. Förklara dina beteckningar och motivera lösningarna väl. Om inget annat anges är koordinatsystemen ortonormerade och positivt orienterande. 2. Beräkna det minsta avståndet mellan punkten P : (0, 1, 5) och planet med parameterframställningen π : (x, y, z) = s(1, 1, 1) + t(−1, −1, 0), s, t ∈ R. Bestäm dessutom den punkt Q i π som ligger närmast P . ⎧ ⎨ 𝑥 = 1 + 2𝑡 𝑦 = 1 − 2𝑡 ⎩ 𝑧 = 4 + 3𝑡 . 3. a) Lös matrisekvationen (𝑋 − 𝐴)−1 = 𝐵, där ( ) ( ) 1 3 1 2 𝐴= och 𝐵= . 3 9 −3 4 (0.5) 4. Låt u = (4, 3, 5) och v = (14, −2, 0). a) Beräkna den minsta vinkeln, [u, v], mellan vektorerna u och v. (0.5) LYCKA TILL ! (0.5) b) Bestäm de vektorer w som uppfyller [u, w] = [v, w], dvs bildar en lika stor vinkel med u som med v. (0.5) 5. a) Formulera definitionen för att tre vektorer, ê1 , ê2 , ê3 , bildar en ortonormerad bas i rummet. (0.4) b) Konstruera en ny ortonormerad bas ê1 , ê2 , ê3 sådan att ê3 har samma riktning som vektorn (1, −1, 1) och ê1 är parallell med xy-planet. Ange även koordinaterna till vektorn u = (0, 0, 1) i den nya basen. (0.6) 6. Du sitter i ett vintermörkt studentrum. In genom nyckelhålet P tränger en smal solstråle som reflekteras av en spegel varpå den träffar en punkt Q på väggen. I en idealiserad matematisk modell beskrivs nyckelhålet som en punkt P : (8, 5, 4). Det antages dessutom att ljusstrålen inledningsvis har riktningen v = (−5, −5, −1), att spegelytan ligger i planet σ : x + 2y = 0 och att väggens punkter uppfyller ekvationen π : 2x − y + 5 = 0. Bestäm koordinaterna för Q. u3 = (0, 1, 1) respektive w3 = (0, 0, −1). TENTAMENSSKRIVNING Linjär algebra 2011–01–10 kl 8–13 LYCKA TILL! TENTAMENSSKRIVNING LINJÄR ALGEBRA 2012-01-11 kl 8–13 LUNDS TEKNISKA HÖGSKOLA MATEMATIK INGA HJÄLPMEDEL. Lösningarna skall vara försedda med ordentliga motiveringar. Alla koordinatsystem får antas vara ortonormerade och positivt orienterade, om inte annat anges. 1. a) Ange en ekvation på affin form för planet π genom punkten (1, 3, 1) och linjen (x, y, z) = (1 − t, 1 + 3t, t), t ∈ R. (0.5) b) Beräkna avståndet mellan punkten (1, 2, 2) och π. (0.5) 2. Låt u1 = (−a, 1, 1), u2 = (−1, 1, a) och u3 = (1, 1, −1). Bestäm för varje värde på parametern a alla lösningar till vektorekvationen λ1 u1 + λ2 u2 + λ3 u3 = 0. För vilka värden på a är u1 , u2 , u3 linjärt beroende? b) Låt F vara den linjära avbildningen sådan att och (0.4) c) Beräkna volymen av den parallellepiped som fås genom att tillämpa F på parallellepipeden i a). Beräkna arean av den parallellogram som fås genom att tillämpa F på parallellogrammen i a). (0.4) 5. Bestäm en bas e01 , e02 , e03 sådan att e01 är parallell med linjen l1 : (x, y, z) = (3 + t, −2 − t, 5), t ∈ R, e02 är ortogonal mot e01 och parallell med planet π : x + 2y − z = 3 och e03 är ortogonal mot e02 och mot linjen l2 : (x, y, z) = (1, 0, 2) + t(−1, 1, 2), t ∈ R. Är e01 , e02 , e03 en ON-bas? Ange en ekvation för π i det nya koordinatsystemet Oe01 e02 e03 . 6 −1 −11 A = −10 −3 11 −1 −1 −4 6. Matrisen 1 har egenvektoren −1. Är A diagonaliserbar? 0 SLUT! ( 1, 4 2, 8 3, 3 9, 1 ) . b) Se boken. 4. En bas för nollrummet är (−5, 2, 1, 0) och (3, −2, 0, 1). Rang(A)=2 och nolldim(A)=2. 5. Om ⎛ ⎞ −4 −8 1 ⎝ 1 −5 1 ⎠ 𝑆= 1 1 1 6. Avbildningsmatrisen för G är ⎛ ⎛ ⎞ 0 0 0 ⎝ 0 2 0 ⎠, och 𝐷 = 0 0 5 så gäller likheten 𝑆 −1 𝐴𝑆 = 𝐷. F (0, 1, −1) = (0, 4, −2). Bestäm avbildningsmatrisen för F . 2. Skärningspunkten är 𝑃 : (3, −1, 7). Ekvationen av planet är 𝑥 − 2𝑦 − 2𝑧 + 9 = 0. 𝑋= 4. a) Låt v1 = (1, 0, 1), v2 = (1, 2, 2) och v3 = (1, 1, 1). Bestäm volymen av parallellepipeden med kanterna v1 , v2 och v3 . Bestäm arean av parallellogrammen med sidorna v1 och v2 . (0.2) F (0, 1, 1) = (0, −2, 2) SVAR TILL Linjär algebra 2012 -- 04 -- 13, kl. 8 -- 13 1. Det finns en entydig lösning (𝑥, 𝑦, 𝑧) = (0, 0, 0) då 𝑎 ∕= 0och 𝑎 ∕= −4.. Lösningarna är (𝑥, 𝑦, 𝑧) = 𝑡 (−1, 0, 1) då 𝑎 = 0. Lösningarna är (𝑥, 𝑦, 𝑧) = 𝑡 (1, −2, 7) då 𝑎 = −4. 3. a) 3. Bestäm alla symmetriska matriser X sådan att AX + (XA)T = B, där 2 4 1 4 A= och B = . −1 1 2 1 F (1, 0, 0) = (−2, 0, 0), LUNDS TEKNISKA HÖGSKOLA MATEMATIK ⎞ 1 2 1 ⎝ −1 1 −1 ⎠ . 0 3 −1 LUNDS TEKNISKA HÖGSKOLA MATEMATIK SVAR OCH ANVISNINGAR Linjär Algebra 20110110 kl 813 TEKNISKA HÖGSKOLAN I LUND MATEMATISKA INSTITUTIONEN LÖSNINGAR LINJÄR ALGEBRA 2012-01-11 Svar och några anvisningar. Svar och några anvisningar. 1. Ekvationen BX = 0 har lösningen X = 0 då s 6= −1, 2. Då s = −1 blir lösningen X = t(0, 2, 1) där t ∈ R. För s = 2 får man tvåparameterlösningen X = r(−1, 1, 0) + t(−1, 0, 1) där r, t ∈ R. (Ekvivalent, alla vektorer X = (x1 , x2 , x3 ) som ligger i planet x1 + x2 + x3 = 0.) Svar: √ 2. Svar: 3. Svar: Minsta avståndet är s = 1/ 2. Närmsta punkten är Q : (1, 1, 10)/2. Denitionen på egenvärde och egenvektor nns i boken sidan 238. Diagonaliserbarhet denieras på sidan 247. Matriserna 2 1 S= 1 −1 och D = 1 0 , 0 2/5 diagonaliserar A, dvs. S−1 AS = D. 4. a) b) Svar: [u, v] = π/3. Vektorerna w = (x, y, z) som bildar samma vinkel med u som med v är precis de som ligger i planet π : 3x − 4y − 5z = 0. Anvisning: Villkoret [u, w] = [v, w] är ekvivalent med cos([u, w]) = cos([v, w]) som i sin tur kan uttryckas med hjälp av skalärprodukten som Svar: v·w u·w = . |u| |w| |v| |w| Omskrivning och insättning av siror ger svaret. 5. a) Denitionen av en ortonormerad bas nns på sidan 70, alternativt i ekvation (4) på sidan 69. b) Svar: En bas som uppfyller villkoren i uppgiften är 1 −1 1 1 1 1 1 , ê2 = √ 1 , ê3 = √ −1 . ê1 = √ 2 0 6 3 2 1 (Observera att det kan nnas andra korrekta svar på uppgiften.) Koordinaterna √ √ till vektorn u = (0, 0, 1) med avseende på det nya basen blir u = (0, 2/ 6, 1/ 3). 6. Svar: Q : (4, 13, 4/5). Ljusstrålen bildar i början linjen ` : (x, y, z) = (8, 5, 4) + t(−5, −5, −1) som skärar spegelytan σ : x+2y = 0 i punkten R : (2, −1, 14/5). Den speglade stråles riktning bestäms genom spegling av den ursprungliga riktningen v = (−5, −5, −1) i speglens plan: Anvisning: v̂ = v − 2 n·v n = . . . = (1, 7, −1), |n|2 där n betecknar spegelns normal. Man kan nu bilda ekvationen för den linje `ˆ som beskriver den speglade stråle, och söka dess skärning Q med väggens plan π . 1 a). En riktningsvektor för linjen ger en riktningsvektor för π. Vektoren bestämd av punkten (1,3,1) och en godtyckligt punkt på linjen ger en annan riktningsvektor för π. Vektorprodukten av riktningsvektorerna ger en normalvektor, varav planets ekvation kan bestämmas. Svar: En ekvation är π : x + y − 2z − 2 = 0. b). Enligt Avståndsformeln (Sats 4.6) är avståndet √ 6 . 2 2. Vektorekvationen är ekvivalent med ett homogent kvadratisk linjärt ekvationssystem med koefficientmatris −a −1 1 1 1 , A= 1 1 a −1 som har determinant det A = a2 + 2a − 3. Om det A 6= 0 ger Huvudsatsen att den enda lösningen är λ1 = λ2 = λ3 = 0. I fallen a = −3 och a = 1 lösas ekvationen genom Gausselimination. Svar: Lösningen till vektorekvationen är 1 1 t(− 2 , − 2 , 1), t ∈ R för a = −3, (λ1 , λ2 , λ3 ) = t(−1, 1, 0), t ∈ R för a = 1, (0, 0, 0) för a = 6 −3, 1. Vektorerna u1 , u2 , u3 är linjärt beroende exakt när a = −3 eller a = 1. 3. Då X är symmetrisk ochA + AT är inverterbar fås AX + (XA)T = B ⇐⇒ X = 4 −5 T −1 (A + A ) B = som är symmetrisk. −5 8 4 −5 Svar: Den enda lösning är X = . −5 8 4 a). Svar: Volymen av parallellepipeden är |V (v1 , v2 , v3 )| = 1 och arean av parallellogrammen är |v1 × v2 | = 3. −2 0 0 b). Svar: Avbildningsmatrisen för F är A = 0 1 −3. 0 0 2 c). Volymen med tecken av den nya parallellepipeden är V (F (v1 ), F (v2 ), F (v3 )) = (det A) · V (v1 , v2 , v3 ) enligt Sats 9.11. Arean av den nya parallellogrammen är |F (v1 ) × F (v2 )|. Svar: Volymen av den nya parallellepipeden är 4 och arean av den nya parallellogrammen är 6. 5. Vi kan välja e01 som riktningsvektor för l1 . Vektoren e02 kan väljas som vektorprodukten av e01 och en normalvektor för π. Vektoren e03 kan väljas som vektorprodukten av e02 och en riktningsvektor för l2 . En determinantberäkning ger at detta är en bas. Om S är basbytesmatrisen gäller 0 x x y = S y 0 , z z0 varav planets ekvation i det nya koordinatsystemet kan bestämmas. Skrivningen sker måndagen den 21 maj klockan 8–13 i Vic 3 (+2D) MATEMATIK Svar: En möjlig bas är e01 = (1, −1, 0), e02 = (1, 1, 3), e03 = (1, 5, −2). Denna bas är inte en ON-bas. Ekvationen för π i koordinatsystemet Oe01 e02 e03 är π : −x0 +13z 0 = 3. 6. Om v är den givna vektoren fås Av = 7v, så 7 är egenvärde till A. Det karakteristiska polynomet för A är pA (λ) = λ3 + λ2 − 40λ − 112. Polynomdivision ger pA (λ) = (λ−7)·(λ2 +8λ+16), så egenvärden till A är 7 och −4. De motsvarende egenvektorer är de icke-triviale lösningarna till ekvationssystemet (λI − A)X = 0 . Man ser då att det inte finns 3 linjärt oberoende egenvektorer. Svar: Matrisen A är inte diagonaliserbar. Frågetimmar inför skrivningarna i maj (Tomas Carnstam, . . . ) ∙ fredag 18 maj 10.15–12.00 Lokal: MH:333 ∙ onsdag 23 maj 10.15–12.00 Lokal: MH:333 ∙ fredag 25 maj 10.15–12.00 Lokal: MH:333 ∙ måndag 28 maj 10.15–12.00 Lokal: MH:333 Individuell rådgivning på alla aktuella kurser, utom Kontinuerliga system, i åk 1–2. AH Frågetimmar inför skrivningarna i augusti (Tomas Carnstam, . . . ) ∙ torsdag 23 augusti 10.15–12 Lokal: MH:333 ∙ fredag 24 augusti 10.15–12 Lokal: MH:333 ∙ måndag 27 augusti 10.15–12 Lokal: MH:333