Mån - Åsö grundskola
advertisement

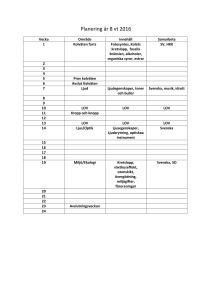
Åsö grundskol KOLFÖRENINGAR 8G Vecka Tisdag 18-19 Fotosyntes (druvsocker) o Cellandning (Koldioxid). Kolets roll i cellen (socker o energi) Kretslopp, ändlig energikälla 20 21-22 23 24 Kol i kemiska föreningar (kolväten, alkohol, kolhydrater, protein) (Ev Mättade, omättade) Olja, blandning av kolväten Raffinering Olika kokpunkter Kolföreningar Film om klimatförändringar, fossila bränslen och alternativa bränslen Klassens dag Torsdag Repetition (häfte) Grundämne, atomer molekyl, Joner Kol i luft, mark, vatten Kol, 4 bindningar Strukturformel, molekylformel Fredag Rita strukturformler Praktisk uppgift (Läxa strukturform) Mättade, omättade Ändelser –en, -yn Lab. Mättade, omättade Ändelser –en, -yn Rita kolväten strukturformel Lov Läxförhör strukturformler Plugg? Repetition.? Fortsättning följer i 9:an Plugg? Repetition.? Planera lab. Utvärdering Städning 10/6 Avslutning Litteratur: Spektrum Kemi - s.131-135 - s.136-137 - s.138-142 - s.143 + s.155-157 (-s.144-147 - s.151-154 - s.158-162 Stenciler Anteckningar kol som grundämne kolets kretslopp kolväten (mättade) fossila bränslen oljeraffinering, olika fossila bränslen) kolväten (omättade) alkoholer Mål för arbetsområdet KOL 9 Eleven skall för G: känna till kolets olika former och användningsområden visa förståelse för kolets betydelse för livet på jorden känna till kolets kretslopp på ett basalt sätt känna till olika kolföreningar och dess användningsområden ( 8 första i metanserien); känna till vad fossila bränslen är, Vg: känna till kolets kretslopp med växt, djur och hav ingående Känna till olika kolväten (mättade och omättade), alkoholer Veta hur olja används och raffineras Dra konsekvenser av resursanvändningen samt hur denna resurs kan ersättas Mvg: Följa en kolatom genom kretsloppet genom industri och människa och tillbaka till naturen Förstå och analysera konsekvenser av koldioxidökningen pga fossila bränslen.