Harmonisk svängningsrörelse Simple Harmonic Motion (SHM)
advertisement
")
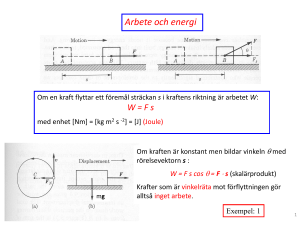
Harmonisk svängningsrörelse Simple Harmonic Motion (SHM) x̂ Den återförande kraften är F kxxˆ vilket ger kraftekvationen: d 2x d 2x d 2x 2 xˆ led : max m 2 kx m 2 kx 0 x0 2 dt dt dt med lösning x A cos(t ) (eller x A sin(t ) ) om vi kallar 2 = k/m A är svängningens amplitud P = 2p / är periodtiden f = 1/P är frekvensen ( t + ) är fasvinkeln där faskonstanten ger x värdet för t = 0 . 1 Position, hastighet och acceleration i SHM x A cos(t ) v dx p Asin(t ) A cos(t ) dt 2 dv a 2 A cos(t ) 2 x dt Hastighet v Läge x x, v och a representerad med roterande vektorer. Rotationen är moturs, värdet läses på X-axeln cos() = sin( + p/2) sin() = cos( - p/2) Acceleration a -cos() = cos(+ p) -sin() = sin(+ p) Exempel: 1 2 Kinetisk energi vid harmonisk svängningsrörelse 1 2 1 Ek mv m 2 A2 sin 2 (t ) 2 2 använd sin 2 1 cos2 och x A cos(t ) ger 1 1 1 Ek m 2 A2 1 cos2 (t ) m 2 A2 x2 k A2 x 2 2 2 2 Det sista uttrycket är identiskt med det som tidigare tagits fram genom att integrera fjäderkraften. Det framgår att: Vid SHM är kinetiska energin maximal för x = 0 och 0 vid vändlägena, x =A 3 Potentiell energi vid harmonisk svängningsrörelse Den potentiella energin erhålls ur sambandet : dEp/dx = F = kx Etot vilket ger Ep = (1/2)kx2 om Ep = 0 för x = 0. Etot = Ek + Ep = (1/2)k(A2 - x2)+ (1/2)kx2 = (1/2)kA2 Totalenergin Etot är alltid konstant och växlar mellan potentiell och kinetisk energi. Exempel: 2 4 Exempel: Pendel Exempel: 3 5 Anharmonisk svängning Här gäller ej att Ep = (1/2)k(xx0)2 vilket leder till att svängningen blir assymetrisk och att frekvensen beror av amplituden. För små svängningar kring jämviktsläget x0 är ändå SHM en god approximation vilket framgår om potentiella energin kring x0 Taylor utvecklas: = 0 ty x0 min dE E p E p ( x0 ) p dx 2 1 d Ep x0 x x0 2 dx2 =k>0 2 3 x x O x x x 0 0 0 Ep(x) konstant + (1/2)k(x - x0)2 Dvs: vi har i allmänhet SHM för små svängningar För stora utslag kan t.ex. en dämpad pendel utsatt för oscillerande kraft ge irreguljär, kaotisk rörelse. Närliggande startvärden ger helt olika slutvärden. Exempel: 4 6 Dämpade svängningar I en mer realistisk modell av svängningsrörelse har vi även en bromsande term pga friktion (t.ex. luftmotstånd). Vanligast är att friktionskraften skrivs: F = lv = l (dx/dt) dx d 2x Ftot kx l m 2 dt dt d 2 x l dx k x0 2 dt m dt m Lösning: x(t ) Cer1t Der2t där r1,2 är lösn. till karakteristiska ekv. l k l l k r2 r 0 r m m 2m 2m m 2 2 x(t ) et C ei där 02 2 02 2 t D ei 02 2 02 Om 2 < 02 (svag dämpning) t Aet cos t 7 Dämpade svängningar x(t ) Aet cos t Dämpad svängning: 1) Amplituden minskar med tiden 2) Frekvensen lägre än för det odämpade fallet 02 2 Exempel: 5 8